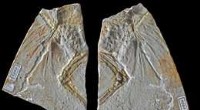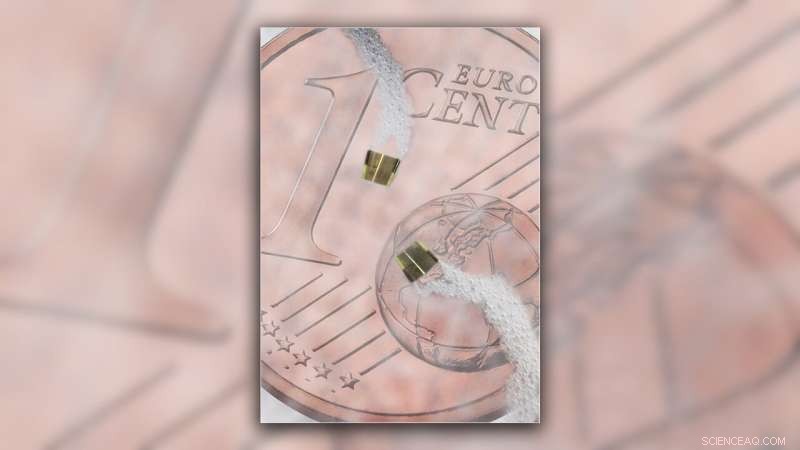
I più piccoli microrobot elettronici semoventi sviluppati dai ricercatori manovrano nel liquido sopra una moneta da 1 centesimo di euro. Credito:TU Chemnitz.
Un team di ricerca internazionale guidato dal Dr. Oliver Schmidt, lavorando presso la Chemnitz University of Technology (TU Chemnitz) e Leibniz IFW Dresden ha recentemente sviluppato un sistema microbico con una vasta gamma di possibili applicazioni, che vanno dal completamento di micro-chirurgia alla consegna di beni agli esseri umani. Questo robot, presentato in un articolo pubblicato in Elettronica della natura , si basa su un'idea introdotta dallo stesso team di ricercatori quasi un decennio fa.
"Abbiamo iniziato a esplorare l'idea di creare un minuscolo sistema microrobotico che è semovente da un potente motore a reazione e ha componenti microelettronici a bordo quasi dieci anni fa, " Schmidt ha detto a TechXplore. "La nostra idea iniziale era quella di costruire un microsistema intelligente semovente in grado di interagire con singole cellule biologiche, che sono di dimensioni simili al microsistema stesso. Questo sistema dovrebbe essere in grado di muoversi, sentire il suo ambiente, trasportare merci, consegnare farmaci ed eseguire micro-chirurgia”.
Da quando Schmidt e i suoi colleghi hanno introdotto per la prima volta il loro concetto di sistema microrobotico, il loro team e molti altri in tutto il mondo hanno cercato di creare tecnologie simili, principalmente in vitro (cioè, utilizzando piastre di Petri). Implementazione come sistema all'interno del corpo umano, però, si è rivelato molto più impegnativo. Infatti, per completare i compiti all'interno del corpo, il sistema dovrebbe essere controllato dall'esterno e le informazioni che raccoglie (ad es. dati diagnostici) dovrebbero essere facilmente trasmesse al mondo esterno (ad es. a medici o operatori sanitari).
"Affinché un sistema microrobotico funzioni nel corpo umano, dovrebbe contenere energia elettrica, sensori, attuatori, antenne e circuiti microelettronici, Schmidt ha spiegato. “L'obiettivo principale del nostro recente lavoro è stato quello di fare un grande passo verso questo traguardo finale (e certamente molto ambizioso); sempre in modo semplificato, Certo."
Schmidt e i suoi colleghi hanno fabbricato il loro microsistema flessibile integrando componenti elettronici micro e nano su una superficie del chip, in modo simile a come viene utilizzata la tecnologia al silicio per costruire chip per computer. Una differenza fondamentale tra il loro sistema e i normali chip per computer, però, è che il design del primo include motori a reazione creati utilizzando un approccio pionieristico circa vent'anni fa, che non è tipicamente utilizzato nello sviluppo della microelettronica tradizionale.
"Il trucco consiste nel mettere materiali sottili molto tesi sul chip, che si riavvolgono (avvolgono) nelle strutture di microtubi Swiss roll, quando vengono delaminati dalla superficie del truciolo, " ha detto Schmidt. "Questa procedura può essere controllata bene, in modo che i microtubi arrotolati siano saldamente collegati ai due lati opposti al sistema microrobotico. Se questi microtubi sono rivestiti di platino all'interno, le bolle di ossigeno sono generate da una reazione catalitica, una volta che il platino entra in contatto con una soluzione acquosa contenente un po' di acqua ossigenata (H 2 oh 2 )."

Dr. Oliver G. Schmidt mentre conduceva la sua ricerca. Credito:Jacob Müller.
Come risultato della strategia di progettazione non convenzionale utilizzata da Schmidt e dai suoi colleghi, quando il sistema microrobotico viene posto in una soluzione acquosa contenente perossido di idrogeno (H 2 oh 2 ) la soluzione entra nei suoi due microtubi, generando bolle di ossigeno. Queste bolle vengono poi spinte all'esterno delle estremità dei microtubi, accelerando il sistema mediante un meccanismo noto come propulsione a getto.
"Questo principio di propulsione a getto è stato introdotto dal nostro gruppo 12 anni fa, " ha detto Schmidt. Tuttavia, un motore a due reattori come nel nostro lavoro attuale non è mai stato costruito prima."
La reazione catalitica alla base della strategia di propulsione a getto dei ricercatori può essere controllata modificando la temperatura dei motori a reazione. Una temperatura elevata si traduce in più bolle e una spinta più forte; una bassa temperatura in meno bolle e una spinta più debole.
Schmidt e i suoi colleghi controllano la temperatura di uno dei due motori a reazione applicando una corrente che passa attraverso un elemento resistivo, che è collegato al motore. Le variazioni di temperatura aumentano la quantità di bolle generate e la successiva spinta in uno dei motori a reazione, che a sua volta consente al sistema di svoltare a destra o a sinistra.
"Potresti chiederti come abbiamo fornito la corrente che riscalda l'elemento resistivo, " ha detto Schmidt. "A questo scopo, abbiamo integrato una minuscola antenna nel microsistema che può essere alimentata da energia wireless dall'esterno (simile alla ricarica induttiva wireless del tuo cellulare). Quindi l'energia elettrica è a bordo e può essere utilizzata, che è completamente nuovo per un microbot semovente così piccolo."
Il minuscolo robot sviluppato da Schmidt e dai suoi colleghi ha anche un piccolo braccio, che gli consente di afferrare e rilasciare piccoli oggetti nell'ambiente circostante. Quando la temperatura del sistema cambia, il braccino compie diverse azioni, piegarsi per afferrare oggetti (es. micro-pillole) o chinandosi per rilasciarle.
"Questo braccio robotico integrato è anche una funzionalità completamente nuova per i microsistemi semoventi, Schmidt ha detto. "Finalmente, il microrobot può avere a bordo un minuscolo LED a infrarossi, che può essere acceso dall'energia trasferita in modalità wireless. Questo LED potrebbe essere utile per tracciare il microrobot all'interno del corpo. L'accensione e lo spegnimento di minuscoli LED su un microrobot mobile non è mai stato mostrato prima."
Il minuscolo sistema robotico sviluppato da Schmidt e dal suo team è realizzato con un materiale altamente flessibile. Ciò significa che può essere piegato o deformato senza rompersi, quindi potrebbe anche passare attraverso minuscoli capillari o altri piccoli canali nel corpo umano e continuare a funzionare normalmente.
Nel futuro, questo nuovo sistema potrebbe avere una serie di preziose applicazioni. Ad esempio, potrebbe svolgere compiti all'interno del corpo umano che richiedono un alto livello di precisione, comprese le procedure chirurgiche o diagnostiche.
"Abbiamo dimostrato che l'energia elettrica può essere trasferita in modalità wireless a sistemi microrobotici ultra-piccoli e che questa energia può essere utilizzata per svolgere compiti utili:guidare il microrobot a distanza o accendere e spegnere un LED a infrarossi, " Schmidt ha detto. "Il prossimo passo sarà quello di eseguire il sistema in fluidi biologici come il sangue. Per questo scopo, i motori devono essere costruiti in un modo leggermente diverso."
© 2020 Scienza X Rete