Credito:Ji et al.
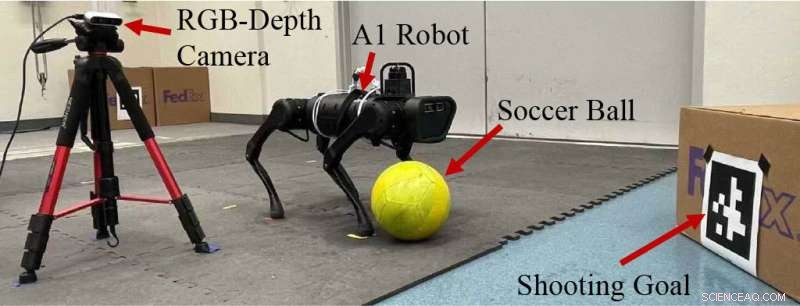
I ricercatori dell'Università della California, Berkeley (UC Berkeley), dell'Università di Montréal e di Mila hanno recentemente sviluppato un framework di apprendimento per rinforzo gerarchico per migliorare la precisione dei robot quadrupedi nel tiro a segno. Questo framework, introdotto in un documento pre-pubblicato su arXiv, è stato implementato su un Unitree A1, un robot quadrupede sviluppato da UnitreeRobotics.
"Le gambe umane non servono solo per la locomozione, ma possono anche essere utilizzate per manipolazioni come giocare a calcio, e vogliamo consentire anche ai robot quadrupedi di raggiungere questa capacità", ha detto a TechXplore Zhongyu Li, uno dei ricercatori che hanno condotto lo studio. "C'è una lega notevole nella comunità della robotica chiamata 'RoboCup' (Robot World Cup), che da decenni invita i ricercatori ad addestrare i loro robot a giocare a calcio."
I recenti progressi hanno consentito la creazione di hardware più affidabile e algoritmi di controllo avanzati per i robot. Di conseguenza, i robot ora sono più agili e potrebbero potenzialmente affrontare compiti più complessi, incluso giocare a calcio insieme agli umani. Il framework sviluppato da Li e dai suoi colleghi potrebbe aiutare a migliorare la capacità dei robot quadrupedi di sparare la palla durante le partite di calcio.
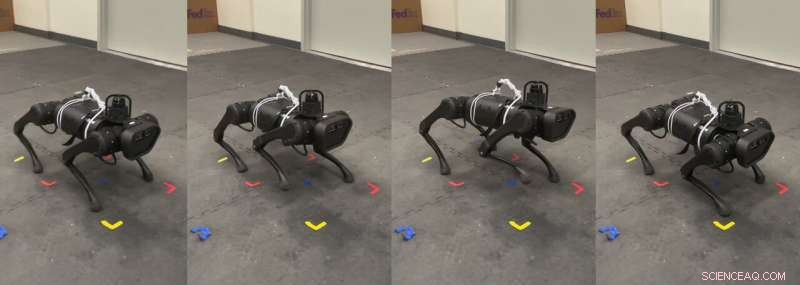
Il nuovo framework ha due componenti chiave:una politica di controllo del movimento e una politica di pianificazione del movimento. Il componente di controllo del movimento consente al robot di tracciare una traiettoria arbitraria per la punta del piede sulla gamba che calcia. La politica di pianificazione del movimento, d'altra parte, seleziona una traiettoria ottimale della punta per sparare un pallone da calcio vicino (rilevato da una telecamera esterna) a una posizione bersaglio (ad esempio, il palo della porta).
Credito:Ji et al.
"Il nostro design ci consente di disaccoppiare la sfida del preciso compito di tiro del calcio nelle due sottoattività:controllo e pianificazione", ha affermato Li. "Possiamo prima concentrarci sull'allenamento di una solida politica di controllo che possa funzionare sull'hardware, quindi riutilizzare un tale controller per apprendere la strategia di pianificazione. Per sparare con precisione la palla a bersagli nel mondo reale, il pianificatore viene addestrato utilizzando il vero -dati mondiali quando il robot sta sparando il vero pallone da calcio."
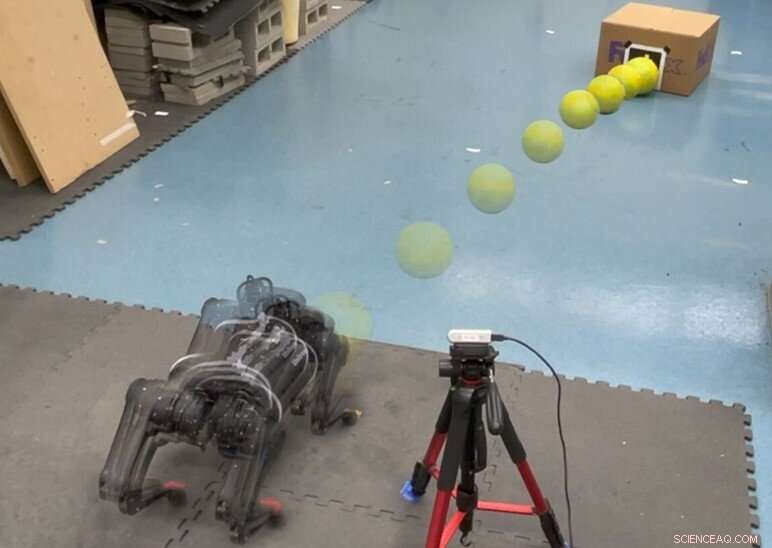
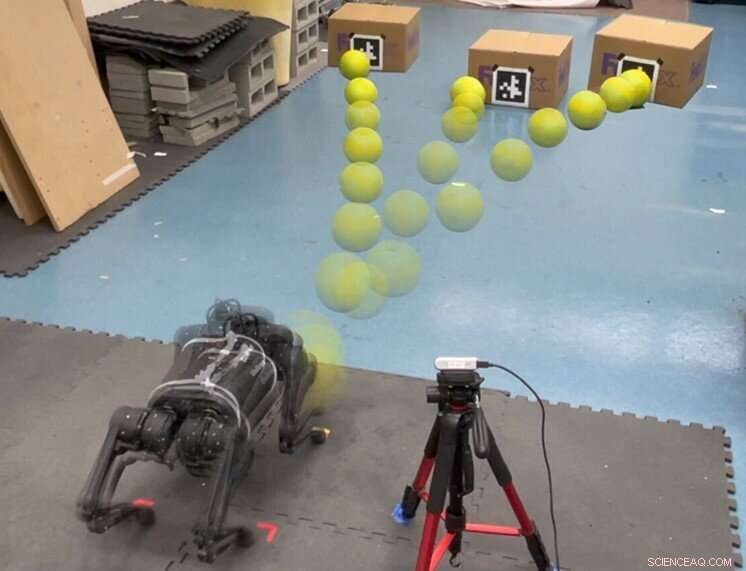
Li e i suoi colleghi hanno testato la loro struttura in una serie di test nel mondo reale, utilizzando un robot quadrupede A1. Hanno scoperto che permetteva al robot di sparare un pallone da calcio deformabile a bersagli casuali con alta precisione. Questo è un compito molto complesso da affrontare, poiché il robot deve oscillare rapidamente la gamba che scalcia e guadagnare slancio senza perdere l'equilibrio.
"Il pallone da calcio introduce più sfide perché il robot deve affrontare non solo il contatto morbido difficile da modellare con la palla deformabile, ma anche le incertezze dell'attrito volvente tra la palla e il terreno", ha affermato Li. "La metodologia che abbiamo sviluppato per affrontare tali problemi potrebbe essere potenzialmente utile per le attività in cui i robot dinamici, come i robot con le gambe, devono interagire con oggetti morbidi, come palline, corde, guinzagli, vestiti, ecc."

Credito:Ji et al.
Credito:Ji et al.
Credito:Ji et al.
In futuro, il framework creato da questo team di ricercatori potrebbe essere utilizzato per migliorare le prestazioni dei robot nei tornei di calcio, in particolare Robocup. Nel frattempo, Li e i suoi colleghi hanno in programma di ideare altri framework e modelli di apprendimento automatico per migliorare le prestazioni dei robot in altri elementi del gioco del calcio.
"Il nostro obiettivo a lungo termine è sviluppare giocatori di calcio robotici quadrupedi che potrebbero un giorno competere con gli umani", ha aggiunto Li. "Stiamo sviluppando abilità calcistiche più complesse utilizzando robot quadrupedi e speriamo, nel prossimo futuro, di poter iniziare una partita di calcio completamente autonoma utilizzando robot quadrupedi". + Esplora ulteriormente
© 2022 Rete Science X














