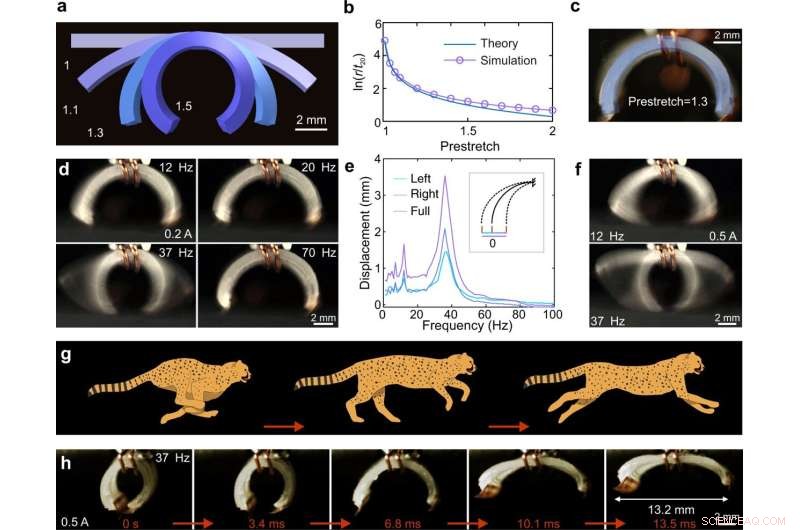
Progettazione e caratterizzazione di SEMR su piccola scala. a Forma simulata del film a doppio strato con diversi prestiramenti:1.0, 1.1, 1.3 e 1.5. b Raggio simulato e calcolato del film a doppio strato in funzione del prestiro applicato. c Immagini sovrapposte delle forme SEMR sperimentali e simulate (vista laterale) con un prestiro di 1,3. d Istantanee delle vibrazioni SEMR per corrente a onda quadra da 0,2 A con frequenze diverse (filmato supplementare 2). I frame 37 Hz e 12 Hz corrispondono al massimo spettrale principale e al secondo più grande, che può essere visto in e. e Spostamento orizzontale del piede sinistro del robot soggetto a una corrente a onda quadra di 0,2 A a frequenze diverse (Film supplementare 2). Il robot è montato sulla parte superiore di un magnete e fissato al centro con fili di rame. Il riquadro illustra tre spostamenti (Sinistra, Destra e Completo). Corrispondono rispettivamente allo spostamento massimo dalla posizione di riferimento “0” (nessuna corrente) a sinistra (estensione), a destra (contrazione) e alla loro somma. La curva superiore (Completa) mostra l'intera gamma dello spostamento del piede. f I fotogrammi del test di vibrazione per correnti a onda quadra di 0,5 A a frequenze di 12 Hz e 37 Hz (Film supplementare 2) illustrano l'intervallo di movimento lontano e vicino alla frequenza di risonanza. g Illustrazione raffigurante un ghepardo in corsa. h Istantanee dal video della telecamera ad alta velocità (Film supplementare 2), che mostrano le fasi del movimento del robot guidato da una corrente a onda quadra (0,5 A, 37 Hz). Credito:Comunicazioni sulla natura (2022). DOI:10.1038/s41467-022-32123-4
Un team di ricercatori della Johannes Kepler University, in Austria, ha sviluppato una serie di minuscoli robot elettromeccanici orientabili che possono camminare, correre, saltare e nuotare ad alta velocità per le loro dimensioni. Nel loro articolo pubblicato sulla rivista Nature Communications, il gruppo descrive come hanno costruito i loro robot e suggerisce possibili usi per loro.
Come notano i ricercatori, molti animali possono muoversi rapidamente, ad esempio i ghepardi o le gazzelle. Questi tratti si sono evoluti per aiutare gli animali a catturare la preda o eludere la cattura da parte dei predatori. La creazione di robot con capacità di velocità simili è stato un obiettivo degli scienziati per molti anni, ma raggiungerlo si è rivelato difficile. In questo nuovo sforzo, i ricercatori hanno costruito una serie di robot utilizzando attuatori elettromagnetici morbidi e minuscoli con bobine di metallo liquido incorporate che sono veloci per le loro dimensioni.
Per realizzare i loro robot, i ricercatori hanno stampato bobine di metallo liquido su diversi substrati che avevano caratteristiche desiderabili diverse, come la piegabilità. Le bobine sono state stampate in un modo che avrebbe consentito a diverse parti del substrato di essere manipolate nel modo desiderato:piegare solo una parte, ad esempio, potrebbe consentire a una parte posteriore di oscillare come una coda quando nuota come un pesce. Piegare altre parti consentite per camminare, saltare e sterzare. I ricercatori hanno anche aggiunto altri elementi per migliorare le prestazioni, come i piedi a dente di sega o a forma di L. Tutti i robot sono stati controllati tramite un campo magnetico e alimentati tramite un cavo o un pacco batteria.
I ricercatori hanno utilizzato la lunghezza del corpo al secondo (BL/s), che consente confronti non solo con altri piccoli robot, ma con robot di tutte le dimensioni e persino con animali. Un'auto da corsa di formula I, ad esempio, può muoversi a circa 50 BL/s.
Nel testare i loro robot, i ricercatori hanno scoperto che il loro robot funzionante legato alle dimensioni di un francobollo poteva muoversi a circa 70 BL/s sulla sua superficie migliore e a circa 35 BL/s su superfici arbitrarie:il suo robot libero, caricato con un pacco batteria, poteva gestire solo 2,1 BL/s. Hanno anche scoperto che il loro robot nuotatore legato poteva nuotare a circa 4,8 BL/s. Per mettere in prospettiva i risultati, un ghepardo corre tra 20 e 30 BL/s. + Esplora ulteriormente
© 2022 Rete Science X