 Il veicolo subacqueo autonomo DEPTHX Foto © Stone Aerospace/PSC, Inc.
Il veicolo subacqueo autonomo DEPTHX Foto © Stone Aerospace/PSC, Inc. Di cosa avresti bisogno per esplorare un oceano su Europa, una delle lune di Giove? È a centinaia di milioni di miglia di distanza, e l'oceano giace sotto uno strato di ghiaccio spesso almeno 10 chilometri (6 miglia). Probabilmente avresti bisogno di una navicella spaziale per atterrare sul ghiaccio, un modo per perforare il ghiaccio, e un veicolo sommergibile per esplorare l'oceano e riportare i risultati sulla Terra.
Questo veicolo sommergibile è un progetto che occupa gli sforzi del Dr. Bill Stone, CEO di Stone Aerospace ad Austin, Texas. Stone e i suoi colleghi hanno sviluppato un prototipo veicolo subacqueo autonomo (AUV) chiamato Esploratore termico freatico profondo (DEPTHX) per l'esplorazione remota e lo stanno attualmente testando in una grande grotta sottomarina. In questo articolo, esamineremo questo rivoluzionario AUV, la sua missione e come si inserisce nel più ampio schema di esplorazione extraterrestre.
Il progetto DEPTHX fa parte di una serie finanziata dalla NASA per sviluppare sonde robotiche in grado di esplorare Europa (discuteremo perché Europa è un obiettivo così interessante in seguito). Stone Aerospace progettato, costruito e gestisce DEPTHX in collaborazione con i suoi partner:
 DEPTHX in coperta durante uno dei suoi test Foto © Stone Aerospace/PSC, Inc.
DEPTHX in coperta durante uno dei suoi test Foto © Stone Aerospace/PSC, Inc. Il progetto DEPTHX è progettato per rispondere a queste domande:
DEPTH X ha completato il test del serbatoio (che include l'integrazione e la mappatura dei sistemi) e si sta ora preparando a sottoporsi a test in un ambiente completamente sconosciuto:il messicano Zacatón cenote .
Prossimo, diamo uno sguardo più da vicino all'AUV e ai suoi sistemi.
cenotes
I cenotes (pronunciato "say-NO-tay") sono grandi doline d'acqua dolce che si trovano nella penisola messicana dello Yucután. Questi cenotes si sono formati quando l'acqua sotterranea ha inciso nel poroso calcare roccia che costituisce l'intera penisola. Il cenote di Zacáton è uno dei cinque cenote collegati e si pensa che sia il più profondo del mondo. Zacáton ha anche un sorgente idrotermale dentro.
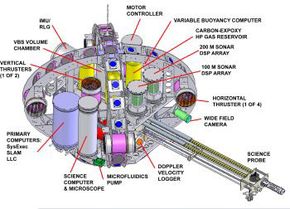 Strutture interne DEPTHX Immagine © Stone Aerospace/PSC, Inc.
Strutture interne DEPTHX Immagine © Stone Aerospace/PSC, Inc. Il DEPTHX AUV è a forma di uovo, con un asse lungo di 4,26 metri (13,97 piedi), un asse corto di 3,04 m (9,97 piedi), e un peso di 1,3 tonnellate (1,43 tonnellate corte). Può muoversi liberamente, passa il mouse e binario a muro in tre dimensioni senza alcun comando esterno. DEPTHX ha una velocità di crociera minima di 0,2 metri al secondo (0,65 piedi al secondo) per la mappatura e può arrivare fino a 1, 000 m (3, 280 piedi). Per operare in autonomia, DEPTHX deve essere in grado di eseguire le seguenti operazioni:
 Un primo piano di un propulsore DEPTHX Immagine © Stone Aerospace/PSC, Inc.
Un primo piano di un propulsore DEPTHX Immagine © Stone Aerospace/PSC, Inc. DEPTHX ha sei propulsori (quattro orizzontali e due verticali), che gli permettono di manovrare in tre dimensioni. Il veicolo può essere manovrato con solo due dei propulsori orizzontali e uno dei propulsori verticali:gli extra sono per il backup.
DEPTHX può anche librarsi. Per mantenere la sua posizione, potrebbe usare i propulsori, ma questo consumerebbe rapidamente la preziosa energia della batteria. Anziché, il veicolo è dotato di due motori a spinta variabile (VBE) . Un computer VBE rileva la pressione, temperatura e salinità (contenuto salino) dell'acqua circostante e calcola l'assetto dell'imbarcazione. Il computer quindi apre o chiude le valvole che consentono alle pompe o al gas pressurizzato di far entrare o uscire l'acqua. Come con i propulsori, c'è una ridondanza incorporata e il DEPTHX può librarsi usando un solo VBE.
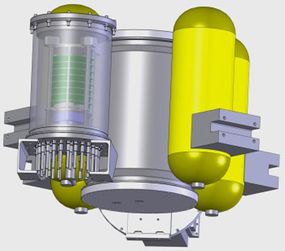 I motori a galleggiabilità variabile consentono a DEPTHX di librarsi. Immagine © Stone Aerospace/PSC, Inc.
I motori a galleggiabilità variabile consentono a DEPTHX di librarsi. Immagine © Stone Aerospace/PSC, Inc. 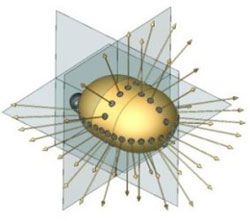 Matrice geometrica della capacità del sensore sonar di DEPTHX Immagine © Stone Aerospace/PSC, Inc.
Matrice geometrica della capacità del sensore sonar di DEPTHX Immagine © Stone Aerospace/PSC, Inc. DEPTHX ha 54 sensori sonar distanziati attorno al suo telaio e controllati da due array sonar . Il sonar utilizza impulsi di onde sonore ad alta energia e le loro riflessioni per individuare oggetti entro un raggio di 250-300 metri dal veicolo. Le informazioni raccolte vengono trasmesse ai computer di bordo per il controllo della navigazione.
Oltre al sonar, DEPTHX naviga utilizzando accelerometri, profondimetri e un'unità di guida inerziale. Un registratore di velocità Doppler determina la velocità con cui si muove il veicolo e invia queste informazioni al computer principale, che regola la velocità del veicolo.
Mentre DEPTHX si muove, i computer utilizzano le informazioni del sonar per creare immagini 3D, che vengono sovrapposti nella memoria del computer per creare una mappa geometrica progressiva. La tecnica si chiama Localizzazione e mappatura simultanee (SLAM) . Bill Stone e i suoi colleghi hanno sviluppato un dispositivo SLAM a propulsione subacquea che hanno usato per mappare la falda acquifera di Wakulla Springs in Florida. DEPTHX utilizza la sua mappa interiorizzata per la navigazione in modo che possa spostarsi in qualsiasi posizione specifica senza l'assistenza di una navigazione esterna, come il GPS.
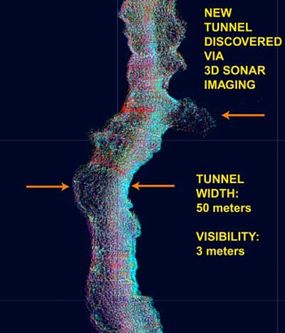 Mappa di una porzione della falda acquifera di Wakulla Springs ottenuta da Stone Aerospace Immagine © Stone Aerospace/PSC, Inc.
Mappa di una porzione della falda acquifera di Wakulla Springs ottenuta da Stone Aerospace Immagine © Stone Aerospace/PSC, Inc. DEPTHX ha diversi computer di bordo dedicati a compiti specifici. Uno controlla le operazioni del veicolo, SLAM e navigazione; uno controlla i VBE; e uno controlla gli esperimenti e analizza i dati. In totale, questi computer contengono più di 30 microprocessori, dai controller a 8 bit ai chip Pentium 4. DEPTHX è programmato per il funzionamento e l'analisi autonomi.
DEPTHX ha due torri di batterie che comprendono batterie ricaricabili agli ioni di litio. Le batterie forniscono fino a otto ore di autonomia.
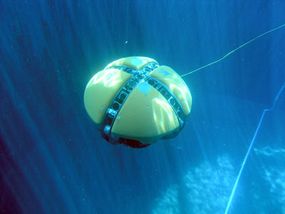 Il DEPTHX AUV sott'acqua Immagine © Stone Aerospace/PSC, Inc.
Il DEPTHX AUV sott'acqua Immagine © Stone Aerospace/PSC, Inc. Può comunicare tramite WiFi in superficie e tramite un singolo cavo in fibra ottica in immersione. Il cavo viene utilizzato per caricare dati o ricevere comandi di controllo quando necessario.
DEPTHX utilizzerà le sue tecnologie SLAM per mappare e visualizzare immagini mentre esplora. Dispone di una fotocamera per immagini ad ampio campo e sarà anche in grado di effettuare misurazioni ambientali come temperatura, pressione e concentrazione di varie sostanze chimiche. Ha anche un braccio estensibile con una sonda scientifica che gli consentirà di raccogliere campioni sia liquidi che solidi e un microscopio a pressione a bordo per aiutare nel rilevamento della vita microbica.
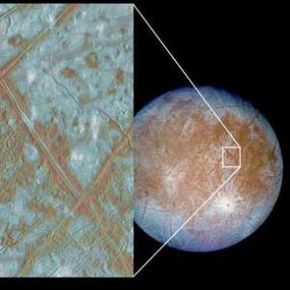 Le zattere di ghiaccio di Europa sono blocchi di ghiaccio che mostrano che Europa potrebbe aver avuto un oceano sotto la superficie nel suo passato. Immagine per gentile concessione del Jet Propulsion Laboratory della NASA
Le zattere di ghiaccio di Europa sono blocchi di ghiaccio che mostrano che Europa potrebbe aver avuto un oceano sotto la superficie nel suo passato. Immagine per gentile concessione del Jet Propulsion Laboratory della NASA Così, perché è Europa, una luna interna di Giove, un obiettivo così interessante per l'esplorazione? Le sonde spaziali Voyager e Galileo hanno mostrato che Europa era ricoperta da uno strato di ghiaccio. Perché Europa è così vicina a Giove, la gravità del pianeta lo trascina, allungando e comprimendo alternativamente la luna nella sua orbita. Queste forze gravitazionali creano calore all'interno della luna. Questo calore fuoriesce attraverso l'attività vulcanica e potrebbe riscaldare la parte inferiore della calotta glaciale, creando un oceano liquido.
La prova di un oceano liquido esiste nel modello fratturato della calotta glaciale, che ha uno spessore di 10 chilometri (6,21 miglia). Modelli simili possono essere visti nella calotta glaciale artica vista dai satelliti dall'orbita terrestre. Le misurazioni del campo magnetico indicano che il futuro oceano potrebbe essere salato. Anche, i calcoli indicano che c'è una quantità sufficiente di calore generato dalle forze di marea per creare un oceano liquido.
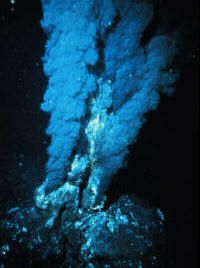 Bocca idrotermale nel fondo dell'oceano Immagine gentilmente concessa da NOAA/ U.S. Dept. of Commerce
Bocca idrotermale nel fondo dell'oceano Immagine gentilmente concessa da NOAA/ U.S. Dept. of Commerce Se esiste un oceano liquido ed esiste attività vulcanica dalle forze di marea, allora potrebbe esserci bocche idrotermali sul pavimento "oceano", come quelli che si trovano sulla Terra vicino alle dorsali oceaniche.
Sulla terra, sappiamo che molte forme di vita diverse sopravvivono intorno alle bocche idrotermali nelle comunità che si basano su chemiosintesi , la formazione di composti organici mediante l'energia geotermica. I batteri chemiosintetici costituiscono la base della catena alimentare in queste comunità. Altri organismi all'interno di queste comunità includono vermi tubicoli giganti, vongole, granchi e pesce.
Astrobiologi credere che la vita abbia bisogno di acqua liquida, composti (organici) contenenti carbonio, e una fonte di energia. Anche Europa sembra avere questi ingredienti e, perciò, potrebbe avere vita.
Quindi una missione su Europa includerebbe un AUV che potrebbe esplorare l'oceano, condurre esperimenti scientifici e riportare i risultati sulla Terra.
L'aerospaziale prevede di costruire un veicolo successivo chiamato RESISTENZA , che farà un passo avanti. sarà più piccolo, ma altrettanto capace come DEPTHX. Il test di ENDURANCE consisterà nell'esplorare un lago in Antartide che è sommerso sotto la calotta glaciale. La NASA sta attualmente sviluppando la tecnologia per sciogliere chilometri di ghiaccio nel lago. ENDURANCE sarà calato attraverso il foro di fusione nel lago per l'esplorazione utilizzando principi e tecnologie scientifiche, sviluppato e testato da DEPTHX.
Per molte altre informazioni su DEPTHX e argomenti correlati, controlla i link nella pagina successiva.
Fonti














