Le tecnologie ricercate nel progetto SeaClear sono in fase di sperimentazione nel porto di Amburgo, tra gli altri. Credito:HPA
Ottantasei milioni di tonnellate di plastica finiscono negli oceani ogni anno, con conseguenze devastanti per la vita marina, natura e, in definitiva, per noi umani. Le vaste macchie galleggianti di plastica che tappezzano la superficie dell'acqua, alcuni grandi quanto interi paesi, sono solo la punta dell'iceberg. Circa il 90% di questa spazzatura finisce sul fondo del mare. Il Fraunhofer Center for Maritime Logistics and Services CML e una rete internazionale di partner vogliono essere i primi a riordinare questo pasticcio con un progetto chiamato SeaClear. Segue un'intervista con i project manager Johannes Oeffner e Cosmin Delea.
Il tuo obiettivo è raccogliere rifiuti sui fondali marini nel progetto SeaClear. Come mai?
Oeffner:L'inquinamento marino è uno dei problemi globali più importanti. Influenza l'ambiente, l'economia, sicurezza, salute e cultura. La plastica non si degrada facilmente, quindi è probabile che rimangano in mare per centinaia di anni. Considerando che le previsioni prevedono che la produzione di plastica quadruplichi entro il 2050, avremo un problema enorme se non agiamo. Secondo il World Economic Forum WEF, il rapporto tra plastica e pesce nel 2014 era di uno a cinque:entro il 2050 potrebbero esserci tanti rifiuti di plastica quanti sono i pesci.
Sono stati proposti molti approcci per rimuovere i detriti di plastica dalla superficie dei mari. Qual è il tuo concetto?
Oeffner:Ci stiamo concentrando prima sulla pulizia del fondale marino, soprattutto nelle zone costiere dove l'inquinamento è particolarmente pesante. Nel concetto SeaClear, stiamo facendo uso di vari veicoli robotici collegati tra loro. Una nave madre autonoma o telecomandata (veicolo di superficie senza equipaggio, USV) è supportato da due robot subacquei (veicolo telecomandato, ROV) e un veicolo aereo o drone (veicolo aereo senza equipaggio, UAV). Usiamo il drone e un robot per tracciare la carta dei rifiuti sulla superficie e nella colonna d'acqua. Il secondo ROV utilizza queste informazioni e utilizza una pinza progettata su misura e un dispositivo di aspirazione per raccogliere i rifiuti mappati sul fondo del mare e gettarli nel bidone collettivo.

Grazie al progetto SeaClear, la costa di Dubrovnik deve essere liberata in futuro dai rifiuti sottomarini. Attestazione:DUNEA
Quali tecnologie ci sono dietro tutto questo?
Delea:Usiamo metodi di controllo multi-agente per robot eterogenei per guidare in modo sincrono tutti i veicoli autonomi. Ciò significa che il cambio di posizione di un robot viene riconosciuto dagli altri robot. Ogni robot ha la capacità integrata di adattarsi a questi cambiamenti senza l'intervento umano. Sebbene diamo un comando, è specificamente indirizzato a un robot, mentre gli altri robot noteranno il cambio di posa e reagiranno se necessario. Utilizziamo algoritmi di deep learning per rilevare e distinguere i rifiuti dalla fauna e dalla flora marina. Nello specifico, combiniamo diversi sistemi sensoriali come telecamere convenzionali e multispettrali o sensori acustici per ottenere dati rilevanti sulle acque e, dopo diversi allenamenti, per rilevare e classificare online i rifiuti marini.
Come si addestrano i robot autonomi?
Delea:Il rilevamento e la classificazione richiedono una formazione intensiva. I primi passi per entrambi sono utilizzare le informazioni provenienti da fonti pubblicamente disponibili, come grandi database online che forniscono filmati di vita marina. Quindi conduciamo ulteriore addestramento con obiettivi fittizi. Prima delle dimostrazioni finali, si svolgono prove preliminari per valutarne le prestazioni.
Le zone costiere sono molto diverse. Dove si svolgono queste prove?
Oeffner:Attualmente stiamo testando le tecnologie in due diversi scenari in due località a profondità comprese tra 20 e 30 metri. Vogliamo dimostrare il processo mentre le operazioni portuali sono in corso con l'infrastruttura esistente e le procedure fisse nel porto di Amburgo. Ecco perché questo scenario si concentra sulla zona industriale del porto. Lo scenario costiero a Dubrovnik, Croazia, si rivolge al settore turistico ed è finalizzato specificamente alla pulizia delle acque nei punti caldi del turismo. Le prime prove si sono svolte in entrambe le sedi in primavera. Ulteriori test sono previsti per Dubrovnik alla fine dell'estate dopo che le prove sono state sospese a causa del corona.
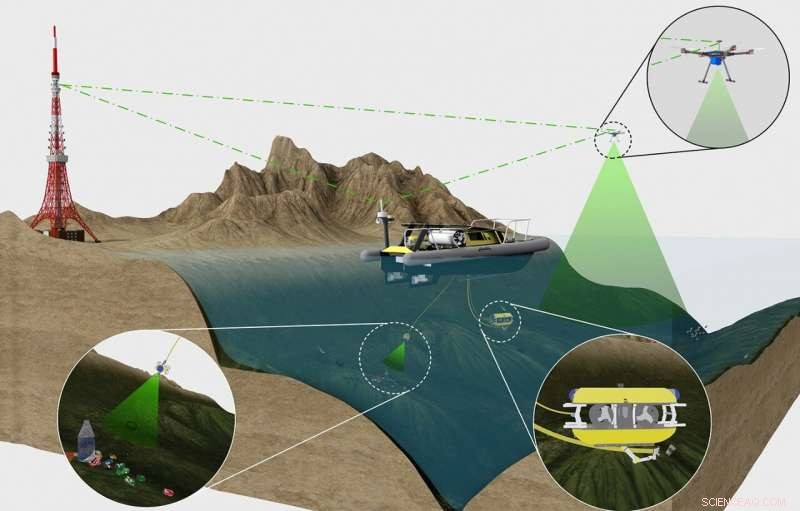
Diversi veicoli robot sono collegati in rete tra loro nel sistema SeaClear. Una nave madre autonoma o telecomandata (UPS) in superficie è supportata da due robot subacquei (ROV) e un drone di volo (UAV). Attestazione:TUM
Quali sono le maggiori sfide in questo progetto?
Delea:Le sfide nei due siti di prova sono diverse:le acque di Amburgo sono molto difficili da analizzare a causa della loro torbidità e della scarsa visibilità. Inoltre, attualmente non ci sono statistiche chiare sul tipo e sulla quantità di rifiuti sottomarini nell'area portuale. È qui che vogliamo sviluppare ulteriormente la robustezza e le caratteristiche individuali del sistema SeaClear e renderlo pronto per il mercato. A tal fine, abbiamo portato a bordo le parti interessate del porto di Amburgo per esaminare SeaClear come un futuro servizio portuale. La grande difficoltà a Dubrovnik è che l'accesso del pubblico non può essere limitato. D'altra parte, ciò significa che saranno necessarie una serie di misure di sicurezza aggiuntive, che dovrà essere preso quando il sistema sarà testato in loco. Ma la visibilità in queste acque è vicina all'ideale, quindi l'obiettivo principale è convalidare l'intero sistema e mostrare il suo set completo di funzionalità.
Come state affrontando questi problemi?
Delea:Ad Amburgo, stiamo cercando di fondere i dati di diversi sensori durante la mappatura dei rifiuti marini per valutare che tipo di rifiuti sottomarini si trovano in queste acque. Utilizziamo principalmente sensori acustici a causa della visibilità limitata. A Ragusa, installeremo meccanismi di sicurezza aggiuntivi sul drone volante, con un po' di assistenza dai sensori sulla nave madre. L'obiettivo qui è ridurre al minimo i problemi di sicurezza e prevenire le collisioni.
E come farai a garantire che ecosistemi fragili come le barriere coralline non vengano danneggiati?
Delea:Questo problema non è presente ad Amburgo, mentre il sito di prova croato ha anche poche barriere coralline. Ma quando verrà distribuito il sistema SeaClear finale, utilizzerà sensori ottici e AI per distinguere le barriere coralline, evitare procedure difficili/pericolose per raccogliere solo la lettiera.
Quale parte del progetto è responsabilità del Fraunhofer CML e chi sono gli altri partner in questa impresa?
Oeffner:CML è il coordinatore tecnico del progetto ed è responsabile dell'integrazione del sistema complessivo, nonché della progettazione e dello sviluppo del cesto subacqueo per contenere i rifiuti raccolti. Cosa c'è di più, stiamo sviluppando un centro di monitoraggio virtuale che invia comandi ai robot e diffonde i loro dati. Il progetto prevede anche la realizzazione della rete di comunicazione e dell'infrastruttura server necessaria per fornire i servizi SeaClear ai vari client tramite interfacce web. Il consorzio è composto dalle Università tecniche di Monaco di Baviera, Delft, Dubrovnik e Cluj-Napoca, nonché SubSea Tech Marseille, l'Autorità Portuale di Amburgo e l'Agenzia di Sviluppo Regionale DUEA di Dubrovnik. L'obiettivo è che anche le ultime due organizzazioni possano operare e utilizzare il sistema sviluppato dopo la conclusione del progetto.