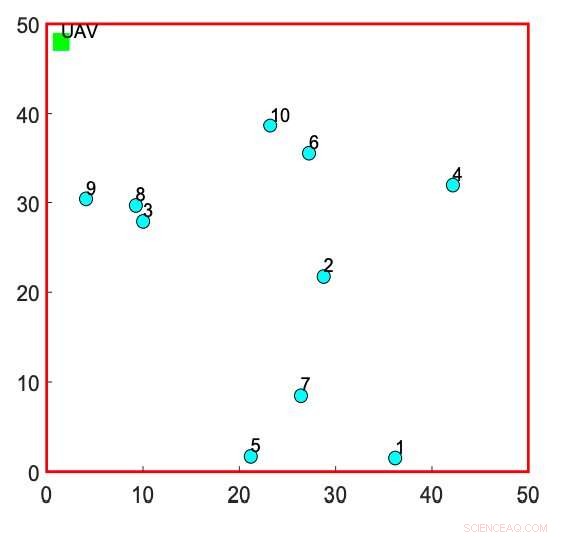
Immagine raffigurante un sistema di coordinate cartesiane bidimensionale, dove l'UAV si trova alla stazione di terra e le GU si trovano nell'area considerata. Credito:Tran et al.
Un team di ricercatori dell'Università del Lussemburgo e dell'Ontario Tech University ha recentemente proposto un nuovo approccio alla progettazione di traiettorie per comunicazioni wireless abilitate per veicoli aerei senza equipaggio (UAV) ad alta efficienza energetica. La loro carta, prepubblicato su arXiv, si concentra in particolare sui casi in cui un UAV funge da stazione base volante (BS) per servire gli utenti di terra (GS) entro alcuni limiti di latenza predeterminati.
"Il nostro obiettivo è progettare la traiettoria dell'UAV per ridurre al minimo il consumo energetico totale soddisfacendo al contempo il fabbisogno RT e il budget energetico, che si ottiene ottimizzando congiuntamente la traiettoria e le velocità dell'UAV lungo i salti successivi, " hanno scritto i ricercatori nel loro articolo.
L'ottimizzazione della traiettoria di un UAV e delle sue velocità insieme può essere alquanto difficile da raggiungere. Fare così, i ricercatori hanno sviluppato un approccio che esegue due passaggi consecutivi.
Il loro approccio prevede l'uso di due algoritmi distinti, una ricerca euristica e un algoritmo di programmazione dinamica (DP). I metodi di ricerca euristica funzionano valutando tutte le informazioni disponibili in ogni fase e decidendo quale percorso seguire in base alle opzioni di classificazione disponibili.
programmazione dinamica, d'altra parte, è un approccio per risolvere problemi con "sottoproblemi" sovrapposti." Funziona affrontando i singoli sottoproblemi solo una volta e salvando i risultati di queste analisi, per poterli riutilizzare se lo stesso sottoproblema si verifica in futuro.
I ricercatori hanno utilizzato la loro ricerca euristica e gli algoritmi di programmazione dinamica per ottenere un insieme fattibile di traiettorie per gli UAV che non violano i vincoli di latenza dell'utente di terra. Il compito di trovare queste traiettorie viene risolto come se si trattasse di un cosiddetto problema del commesso viaggiatore con finestre temporali (TSPTW). TSPTW è un problema algoritmico utilizzato in informatica che comporta la ricerca di un percorso a costo minimo per un venditore che desidera viaggiare e visitare ciascuna di una serie di città esattamente una volta all'interno di una finestra temporale specifica.
Le traiettorie suggerite dagli algoritmi sono state successivamente confrontate con quelle ottenute utilizzando tecniche di ricerca esaustive e affrontando il compito come problema del commesso viaggiatore (TSP); un problema algoritmico in cui è necessario trovare i percorsi ottimali per un venditore che vuole visitare un insieme specifico di città senza requisiti di tempo specifici.
"Mentre l'algoritmo esaustivo raggiunge le migliori prestazioni a un costo di calcolo elevato, l'algoritmo euristico mostra prestazioni inferiori con bassa complessità, " hanno spiegato i ricercatori nel loro articolo. "Di conseguenza, il DP si propone come un compromesso pratico tra gli algoritmi esaustivi ed euristici."
Oltre ai due algoritmi per trovare traiettorie UAV ottimali, i ricercatori hanno anche proposto una tecnica per la minimizzazione dell'energia. Questo metodo funziona ottimizzando congiuntamente le velocità dell'UAV e i successivi salti.
Quando i ricercatori hanno valutato i loro algoritmi hanno scoperto che sono altamente efficaci, superando le tecniche all'avanguardia esistenti sia in termini di consumo energetico che di prestazioni in caso di interruzione. Nel futuro, il nuovo approccio proposto potrebbe aiutare a progettare traiettorie migliori per la minimizzazione dell'energia in applicazioni che coinvolgono comunicazioni wireless abilitate per UAV con vincoli di latenza. Inoltre, il loro lavoro potrebbe aprire la strada a futuri studi volti a sviluppare nuovi strumenti per migliorare le prestazioni delle reti di comunicazione UAV.
© 2019 Scienza X Rete