 Il robot ASIMO di Honda. Vedi altro immagini di robot . Foto per gentile concessione di Honda Motor Co., Ltd.
Il robot ASIMO di Honda. Vedi altro immagini di robot . Foto per gentile concessione di Honda Motor Co., Ltd. Vuoi un robot per cucinare la tua cena, Fai i tuoi compiti, pulisci la tua casa, o fai la spesa? I robot fanno già molti dei lavori che noi umani non vogliamo fare, non posso fare, o semplicemente non possono andare bene come le nostre controparti robotiche. Nelle fabbriche di tutto il mondo, braccia robotiche disincarnate assemblano automobili, mettere delicatamente le caramelle nelle loro scatole, e fare tutti i tipi di lavori noiosi. Ci sono persino una manciata di robot sul mercato il cui unico compito è aspirare il pavimento o falciare il prato.
Galleria di immagini di robot
Molti di noi sono cresciuti guardando i robot in TV e nei film:c'era Rosie, la governante robot dei Jetson; Dati, il membro dell'equipaggio dell'androide in "Star Trek:The Next Generation"; ed ovviamente, C3PO da "Star Wars". I robot che vengono creati oggi non sono del tutto nel regno dei dati o C3PO, ma ci sono stati alcuni incredibili progressi nella loro tecnologia. Gli ingegneri Honda sono stati impegnati a creare il ASIMO robot per più di 20 anni . In questo articolo, scopriremo cosa rende ASIMO il robot umanoide più avanzato fino ad oggi.
La Honda Motor Company ha sviluppato ASIMO, che sta per Passaggio avanzato nella mobilità innovativa , ed è il robot umanoide più avanzato al mondo. Secondo il sito web di ASIMO, ASIMO è il primo robot umanoide al mondo in grado di camminare in modo indipendente e salire le scale .
Oltre alla capacità di ASIMO di camminare come facciamo noi, io posso anche comprendere gesti preprogrammati e comandi vocali , riconoscere voci e volti e interfaccia con schede di comunicazione IC . ASIMO ha braccia e mani in modo che possa fare cose come accendere gli interruttori della luce, porte aperte, trasportare oggetti, e spingere i carrelli.
Piuttosto che costruire un robot che sarebbe un altro giocattolo, Honda voleva creare un robot che sarebbe stato un aiutante per le persone:un robot per aiutare in casa, aiutare gli anziani, o aiutare qualcuno confinato su una sedia a rotelle o su un letto. ASIMO è alto 4 piedi e 3 pollici (1,3 metri), che è proprio l'altezza giusta per guardare negli occhi con qualcuno seduto su una sedia. Ciò consente ad ASIMO di svolgere il lavoro per cui è stato creato senza essere troppo grande e minaccioso. Spesso definito come un "bambino che indossa una tuta spaziale, " L'aspetto amichevole di ASIMO e le dimensioni non minacciose funzionano bene per gli scopi che Honda aveva in mente quando lo ha creato.
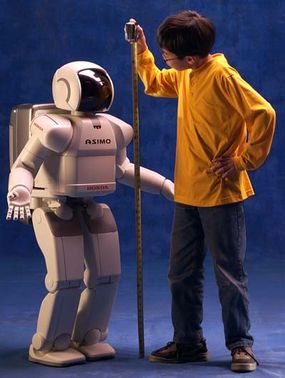 ASIMO è alto solo 4 piedi e 3 pollici Foto per gentile concessione di Honda Motor Co., Ltd.
ASIMO è alto solo 4 piedi e 3 pollici Foto per gentile concessione di Honda Motor Co., Ltd. ASIMO potrebbe fare anche lavori che sono troppo pericoloso per gli esseri umani da fare, come entrare in aree pericolose, bombe disarmante, o combattere gli incendi.
Non posso stare troppo attentoÈ stato riferito che poiché la camminata di ASIMO è così stranamente simile a quella umana, Gli ingegneri Honda si sono sentiti in dovere di visitare il Vaticano solo per assicurarsi che fosse giusto costruire una macchina che fosse così simile a un essere umano. (Il Vaticano pensava che andasse bene.)
Contenuti
 La fisiologia di ASIMO è sviluppata per imitare la fisiologia umana. Foto per gentile concessione di Honda Motor Co., Ltd.
La fisiologia di ASIMO è sviluppata per imitare la fisiologia umana. Foto per gentile concessione di Honda Motor Co., Ltd. I ricercatori Honda hanno iniziato studiando le zampe degli insetti, mammiferi, e il movimento di un alpinista con le gambe protesiche per comprendere meglio la fisiologia e tutte le cose che avvengono quando camminiamo, in particolare nelle articolazioni. Per esempio, il fatto che noi spostare il nostro peso usare i nostri corpi e soprattutto le nostre braccia per bilanciare è stato molto importante per ottenere il giusto meccanismo di deambulazione di ASIMO. Il fatto che abbiamo dita dei piedi è stato preso in considerazione anche l'aiuto con il nostro equilibrio:ASIMO ha effettivamente delle proiezioni morbide sui suoi piedi che svolgono un ruolo simile a quello che svolgono le nostre dita dei piedi quando camminiamo. Anche questo materiale morbido assorbe l'impatto sulle articolazioni, proprio come fanno i nostri tessuti molli quando camminiamo.
ASIMO ha anca, ginocchio, e articolazioni del piede . I robot hanno articolazioni che i ricercatori chiamano " gradi di libertà ." Un singolo grado di libertà consente il movimento sia a destra che a sinistra o su e giù. ASIMO ha 34 gradi di libertà distribuito su diversi punti del suo corpo per consentirgli di muoversi liberamente. Ci sono tre gradi di libertà nel collo di ASIMO, sette per braccio e sei per gamba. Il numero di gradi di libertà necessari per le gambe di ASIMO è stato deciso misurando il movimento articolare umano mentre camminava su un terreno piano, salire le scale e correre.
ASIMO ha anche un sensore di velocità e un giroscopio sensore montato sul suo corpo. Svolgono i compiti di:
Questi sensori funzionano in modo simile alle nostre orecchie interne nel modo in cui mantengono l'equilibrio e l'orientamento.
ASIMO ha anche sensori di superficie del pavimento nei suoi piedi e sei sensori a ultrasuoni nella sua parte centrale. Questi sensori migliorano la capacità di ASIMO di interagire con l'ambiente rilevando gli oggetti intorno ad ASIMO e confrontando le informazioni raccolte con le mappe dell'area memorizzate nella memoria di ASIMO.
Per compiere il lavoro che i nostri muscoli e la nostra pelle fanno nel percepire la potenza muscolare, pressione e angoli articolari, ASIMO ha entrambi sensori ad angolo articolare e un sensore di forza a sei assi .
 Foto per gentile concessione di Honda Motor Co., Ltd.
Foto per gentile concessione di Honda Motor Co., Ltd. A meno che tu non sappia molto di robotica, potresti non comprendere appieno l'incredibile traguardo è che ASIMO cammina come noi. La parte più significativa del cammino di ASIMO è il capacità di svolta . Piuttosto che doversi fermare e mescolare, fermati e mescola, e fermati e spostati in una nuova direzione, ASIMO si piega e gira dolcemente proprio come un essere umano. ASIMO può anche autoregolare i suoi passi in caso di inciampo, è spinto, o altrimenti incontra qualcosa che altera la normale deambulazione.
Per realizzare ciò, Gli ingegneri di ASIMO hanno dovuto trovare un modo per lavorare con il forze d'inerzia creato quando si cammina. Per esempio, la gravità terrestre crea una forza, così come la velocità con cui cammini. Queste due forze sono chiamate "forza d'inerzia totale". C'è anche la forza creata quando il tuo piede si connette con il suolo, chiamata "forza di reazione del suolo". Queste forze devono bilanciarsi, e la postura deve lavorare per farlo accadere. Questo si chiama " punto zero momento " (ZMP).
Per controllare la postura di ASIMO, gli ingegneri hanno lavorato su tre aree di controllo:
Sebbene ASIMO non sia ancora pronto per la prima serata (ci sono ancora miglioramenti che devono essere apportati per consentirgli di funzionare pienamente come spera Honda), Honda ha messo ASIMO a lavorare come receptionist nel suo ufficio a Wako nella prefettura di Saitama, appena a nord di Tokyo. ASIMO trascorre il suo tempo salutando gli ospiti e guidandoli in giro per le strutture.
Per svolgere questi compiti, ASIMO deve essere appositamente programmato per conoscere la disposizione degli edifici e il modo appropriato per accogliere i visitatori e rispondere alle domande.
Se il pensiero di un esercito di robot ASIMO ti dà i brividi, ti puoi rilassare. Honda afferma che ASIMO non verrà mai utilizzato in applicazioni militari.
Per saperne di più

ASIMO può percepire i movimenti di caduta e reagire rapidamente ad essi; ma gli ingegneri di ASIMO volevano di più. Volevano che il robot avesse un andatura fluida oltre a fare qualcosa che altri robot non possono fare... gira senza fermarti .

Quando camminiamo dietro gli angoli, spostiamo il nostro centro di gravità nella svolta. ASIMO utilizza una tecnologia chiamata " controllo predittivo del movimento , " chiamata anche tecnologia di camminata flessibile in tempo reale intelligente di Honda o I-Walk, per realizzare la stessa cosa. ASIMO prevede quanto dovrebbe spostare il suo centro di gravità all'interno della curva e per quanto tempo dovrebbe essere mantenuto tale spostamento. Perché questa tecnologia funziona in tempo reale , ASIMO può farlo senza fermarsi tra i passaggi, che gli altri robot devono fare.
Essenzialmente, con ogni passo che ASIMO fa, deve determinare la sua inerzia e quindi prevedere come il suo peso deve essere spostato per il passo successivo per camminare e girare senza problemi. Regola uno dei seguenti fattori per mantenere la posizione corretta:
Sebbene riprodurre una camminata simile a un uomo sia un risultato straordinario, ASIMO ora può funzionare a velocità fino a 3,7 miglia all'ora (6 chilometri all'ora). Per qualificarsi come un vero robot in corsa, ASIMO deve avere entrambi i piedi sollevati da terra per un istante ad ogni passo. ASIMO riesce a rimanere in volo per 0,08 secondi ad ogni passo durante la corsa.
Gli ingegneri Honda hanno affrontato una serie di sfide completamente nuove mentre cercavano di dare ad ASIMO la capacità di correre. Hanno dato al busto di ASIMO un grado di libertà per aiutare a piegarsi e torcersi in modo che il robot potesse regolare la sua postura mentre era in volo. Senza questa capacità, ASIMO perderebbe il controllo mentre era in volo, possibilmente roteare in aria o inciampare durante l'atterraggio.
Per effettuare curve fluide durante la corsa, gli ingegneri hanno potenziato la capacità di ASIMO di inclinare il proprio centro di gravità all'interno delle curve per mantenere l'equilibrio e contrastare la forza centrifuga. ASIMO potrebbe persino anticipare le curve e iniziare ad appoggiarsi su di esse prima di iniziare la curva, proprio come faresti se stessi sciando o pattinando.
Nella sezione successiva, vedremo come ASIMO è in grado di riconoscere le immagini e percepire il suo ambiente.
 Foto per gentile concessione di Honda Motor Co., Ltd.
Foto per gentile concessione di Honda Motor Co., Ltd. Nella robotica, la visione è un'immagine catturata che viene interpretata in base a programmi programmati modelli . In un ambiente produttivo, dove i bracci robotici costruiscono automobili o robot ispezionano le connessioni microscopiche su chip semiconduttori, hai a che fare con un ambiente controllato. L'illuminazione è sempre la stessa, l'angolo è sempre lo stesso e c'è un numero limitato di cose da guardare e capire. Nel mondo reale (e non strutturato), però, il numero di cose da guardare e capire aumenta notevolmente.
Un robot umanoide che deve navigare attraverso le case, edifici, o all'aperto durante l'esecuzione di lavori deve essere in grado di dare un senso ai molti oggetti che "vede". ombre, angoli e movimenti strani devono essere comprensibili. Per esempio, camminare da solo in una zona sconosciuta, un robot dovrebbe rilevare e riconoscere oggetti in tempo reale, selezionando caratteristiche come il colore, forma e bordi da confrontare con un database di oggetti o ambienti che conosce. Ci possono essere migliaia di oggetti nella "memoria" del robot.
Il sistema di visione di ASIMO è costituito da due elementi di base videocamere per gli occhi, situato nella sua testa. ASIMO utilizza visione stereoscopica e un proprietario algoritmo di visione che fa vedere, riconoscere, ed evitare di imbattersi in oggetti anche se il loro orientamento e illuminazione non sono gli stessi di quelli nel suo database di memoria. Queste telecamere possono rilevare più oggetti, determinare la distanza, percepire il movimento, riconoscere i volti programmati e persino interpretare i movimenti delle mani. Per esempio, quando tieni la mano su ASIMO in una posizione di "stop", ASIMO si ferma. La funzione di riconoscimento facciale consente ad ASIMO di salutare le persone "familiari".
ASIMO può riconoscere oggetti in movimento interpretando le immagini catturate dalle telecamere nella sua testa. Può valutare la distanza e la direzione di un oggetto in movimento, che permette ad ASIMO di seguire una persona, fermare il proprio progresso per consentire a un oggetto in movimento di attraversare il suo percorso, o salutarti mentre ti avvicini.
Le telecamere trasmettono anche ciò che ASIMO vede al controller ASIMO. Quel modo, se stai controllando ASIMO da un PC, puoi vedere cosa vede ASIMO.
Oltre alle telecamere nella sua testa, ASIMO ha diversi sensori che lo aiutano a muoversi negli ambienti e ad interagire con oggetti e persone. I sensori di superficie del pavimento consentono ad ASIMO di rilevare oggetti e cambiamenti nel pavimento. I sensori a ultrasuoni aiutano a orientare ASIMO rilevando gli oggetti circostanti. I sensori aiutano ASIMO a risolvere le discrepanze tra la mappa interna dell'area preprogrammata nella sua memoria e l'ambiente reale.
ASIMO ha anche il senso del tatto, in un modo. I sensori di forza nei polsi di ASIMO consentono ad ASIMO di giudicare quanta forza usare quando si prende un vassoio, porgendoti un fascicolo o stringendoti la mano. ASIMO può integrare le informazioni raccolte dalle sue telecamere e forzare i sensori a muoversi in sincronia con una persona mentre si tiene per mano. Quando si spinge un carrello, I sensori di forza ASIMO aiutano il robot a regolare la quantità di forza necessaria per spingere il carrello (ad esempio, ASIMO può spingere un carrello con più forza se i sensori rilevano un'inclinazione).
Un altro modo in cui ASIMO può rilevare l'ambiente è attraverso l'uso di schede di comunicazione IC. Le schede IC utilizzano segnali a infrarossi per ricevere e trasmettere informazioni. Se possiedi una carta IC con le tue informazioni codificate su di essa, ASIMO può rilevare la tua presenza anche se non sei nel campo visivo delle sue telecamere. Queste carte migliorano la capacità di ASIMO di interagire con gli altri. Per esempio, se dovessi visitare l'ufficio di Honda e ricevere una carta IC come pass per visitatori, ASIMO potrebbe salutarti e indirizzarti nella stanza giusta dopo aver letto elettronicamente le informazioni codificate sulla tua carta.
Prestami i tuoi microfoniCi sono tre microfoni situati nella testa di ASIMO. Usando questi microfoni, ASIMO può ricevere comandi vocali e rilevare la direzione del suono. ASIMO può determinare la posizione da cui proviene il suono e poi girarsi in quella direzione.
ASIMO non è un robot autonomo. Non può entrare in una stanza e prendere decisioni da solo su come navigare. ASIMO deve essere programmato per svolgere un lavoro specifico in un'area specifica che ha marcatori che comprende, oppure deve essere controllato manualmente da un essere umano.
ASIMO può essere controllato con quattro metodi:
Utilizzando la tecnologia wireless 802.11 e un computer portatile o desktop, puoi controllare ASIMO e vedere ciò che ASIMO vede tramite i suoi occhi della fotocamera. ASIMO può anche utilizzare la sua connessione al PC per accedere a Internet e recuperare informazioni per te, come bollettini meteorologici e notizie.
Il controller joystick wireless gestisce i movimenti di ASIMO allo stesso modo di un'auto telecomandata. Puoi far andare avanti ASIMO, indietro, di lato, diagonalmente, girare a posto, camminare dietro un angolo o correre in tondo. Far muovere ASIMO tramite telecomando potrebbe non sembrare così avanzato, ma ASIMO ha la capacità di autoregolare i suoi passi . Se ce l'hai, vai avanti, e incontra un pendio o una specie di ostacolo, ASIMO regola automaticamente i suoi passi per adattarsi al terreno.
ASIMO è in grado di riconoscere e reagire a diversi gesti e posture del corpo, consentendo agli utenti di comandare ASIMO non verbalmente. Puoi indicare un punto particolare verso il quale vuoi che ASIMO cammini, Per esempio, e seguirà il tuo esempio. Se saluti ASIMO, risponderà con un'ondata propria. Può persino riconoscere quando vuoi stringergli la mano.
ASIMO può comprendere ed eseguire semplici, comandi verbali preprogrammati. Il numero di comandi programmabili nella sua memoria è praticamente illimitato. Puoi anche far registrare la tua voce nella sua programmazione, rendendo più facile per ASIMO riconoscerti.
Oltre ai comandi vocali per il controllo dei movimenti di ASIMO, ci sono anche comandi vocali a cui ASIMO può rispondere verbalmente. Questa è la caratteristica che ha permesso ad ASIMO di lavorare come receptionist, salutare i visitatori e rispondere alle domande.
Come la maggior parte delle altre tecnologie nel campo della robotica, ASIMO è alimentato da servomotori . Questi sono motori piccoli ma potenti con un albero rotante che sposta gli arti o le superfici ad un angolo specifico come indicato da un controller. Una volta che il motore ha girato all'angolo appropriato, si spegne finché non viene indicato di riaccendersi. Per esempio, un servo può controllare l'angolo dell'articolazione del braccio di un robot, mantenendolo ad angolo retto finché non deve muoversi, e poi controllando quella mossa. I servi usano a dispositivo di rilevamento della posizione (chiamato anche decoder digitale) per garantire che l'albero del motore sia nella posizione corretta. Di solito usano una potenza proporzionale al carico meccanico che stanno trasportando. Un servo leggermente caricato, Per esempio, non consuma molta energia.
ASIMO ha 34 servomotori nel suo corpo che muovono il suo torso, braccia, mani, gambe, piedi, caviglie e altre parti mobili. ASIMO gestisce una serie di servomotori per controllare ogni tipo di movimento.
ASIMO è alimentato da una batteria ricaricabile, 51,8 volt batteria agli ioni di litio (Li-ION) che dura per un'ora con una sola carica. La batteria è conservata in ASIMO's zaino e pesa circa 13 libbre . La batteria di ASIMO prende tre ore per caricare completamente, quindi una seconda (e terza) batteria è fondamentale se hai bisogno di ASIMO per funzionare per molto tempo. Gli utenti possono caricare la batteria a bordo di ASIMO tramite una connessione di alimentazione o rimuovere lo zaino per caricare separatamente.
Concorsi di robot
Honda Research Institute e ATR Computational Neuroscience Laboratories hanno collaborato nel 2006 per sviluppare un mezzo per controllare ASIMO attraverso il pensiero. Scienziati e ingegneri hanno utilizzato una macchina per la risonanza magnetica per registrare i modelli cerebrali di un soggetto durante una serie di gesti delle mani (un pugno chiuso e il segno di pace "V"). La registrazione è stata poi trasmessa a una mano robotica, che decodificava le informazioni e duplicava i gesti del soggetto. Poiché il sistema di risonanza magnetica non era invasivo, non c'era bisogno di alcuna procedura chirurgica.
Honda spera che questo sia il primo passo nello sviluppo di un sistema che consentirà alle persone paralizzate di controllare dispositivi come ASIMO semplicemente pensandoci. È necessario fare molta più ricerca per consentire agli utenti di eseguire attività complesse e sviluppare un più piccolo, dispositivo leggero per registrare i modelli del cervello.
Curioso di servi?Dai un'occhiata all'introduzione ai servomotori del laboratorio di progettazione meccatronica della Northwestern University.
Per saperne di più
Honda ha iniziato lo sviluppo del suo robot aiutante umanoide nel 1986. Gli ingegneri Honda sapevano che il robot doveva essere in grado di navigare facilmente in una casa o in un edificio, e questo significava che la tecnologia della camminata doveva essere perfetta. Perciò, i loro primi tentativi erano fondamentalmente scatole con le gambe. Una volta che il meccanismo di deambulazione è stato per lo più sviluppato, braccia, le mani e infine una testa sono state aggiunte.
La cronologia ASIMO
 Foto per gentile concessione
Foto per gentile concessione Oltre ad ASIMO, ci sono altri robot umanoidi piuttosto sofisticati là fuori che sembrano fare molte delle stesse cose. La maggior parte di loro è costruita su un much scala più piccola e sono destinati più per intrattenimento rispetto al servizio. Proprio adesso, La più grande competizione di ASIMO in termini di tecnologia sembra essere:
Ci sono anche diversi robot utilizzati negli ospedali di tutto il mondo che percorrono i corridoi e prendono gli ascensori per consegnare le cartelle cliniche, raggi X, medicine e altre cose in tutto l'ospedale. Viaggiano su ruote e si programmano con il layout ospedaliero oppure individuano e seguono marker e codici a barre posti sulle pareti.
I robot sono stati utilizzati in molte aree sin dagli anni '60. Con i processori dei computer sempre più potenti e la tecnologia della robotica che si espande in nuove aree, non passerà molto tempo prima che avremo una "Rosie" per cucinare i nostri pasti e pulire le nostre case.
Per ulteriori informazioni su ASIMO e altri robot, così come i progressi tecnologici che rendono possibili i robot umanoidi, controlla i link nella pagina successiva.
Un robot in cittàASIMO ha incantato il pubblico in occasione di eventi mediatici, spettacoli televisivi, e persino Disneyland. Potresti aver visto ASIMO:














