Una versione iniziale della tecnologia di perforazione, l'Auto-Gopher-1, è raffigurata qui con coresit acquisita dalla perforazione di un foro di 3 m in gesso da 40 MPa. Credito:NASA
La capacità di penetrare nel sottosuolo e raccogliere campioni incontaminati da profondità di decine di metri a chilometri è fondamentale per la futura esplorazione dei corpi nel nostro sistema solare. SMD sta supportando lo sviluppo di un campionatore per perforazione profonda chiamato Auto-Gopher per un potenziale impiego in future missioni di esplorazione dello spazio.
L'Auto-Gopher utilizza un meccanismo di percussione azionato da piezoelettrico per rompere le formazioni e un motore elettrico per ruotare la punta del trapano e catturare i frammenti di polvere. Incorpora un'architettura wireline; il trapano è sospeso all'estremità di un cavo di piccolo diametro che fornisce potenza, comunicazione, così come il supporto strutturale necessario per abbassare e sollevare il trapano fuori dal pozzo. Grazie a questa architettura unica, la profondità massima di perforazione è limitata solo dalla lunghezza del cavo. L'operazione wireline utilizzata sull'Auto-Gopher elimina uno dei principali inconvenienti dei tradizionali sistemi a batteria di perforazione continua:la necessità di più sezioni di perforazione che possono aumentare in modo significativo la massa e la complessità di una perforazione profonda. Come tale, la massa e il volume del sistema Auto-Gopher possono essere mantenuti piuttosto bassi per buche poco profonde o profonde. Durante la perforazione, numerosi sensori e strumenti integrati possono eseguire analisi in situ della parete del pozzo. Al raggiungimento di una profondità prestabilita, il trapano viene retratto dal foro, il nucleo e/o le talee vengono rimossi per un'analisi dettagliata da parte degli strumenti di bordo, e il trapano viene riabbassato nel foro per continuare il processo di penetrazione.
L'Auto-Gopher ha lo scopo di aiutare gli scienziati a rispondere a una delle domande più pressanti della scienza:la vita è mai esistita in qualsiasi altra parte dell'universo? Poiché l'acqua è un prerequisito fondamentale per la vita, come lo conosciamo, Le missioni di esplorazione della NASA stanno prendendo di mira corpi nel sistema solare che sono noti per avere o hanno avuto acqua liquida che scorre. L'ultimo Planetary Decadal Survey (Vision and Voyages for Planetary Science in the Decade 2013-2022) ha raccomandato alla NASA di esplorare tre corpi del sistema solare con regioni acquose accessibili:Marte; la luna di Giove, Europa; e la luna di Saturno, Encelado. Ciascuno di questi organismi pone diverse sfide relative alla perforazione. La perforazione su Marte richiede la penetrazione di roccia secca e regolite che hanno proprietà fisiche (cioè, resistenza alla trazione, durezza, ecc.) che possono variare di molti ordini di grandezza attraverso la profondità di perforazione. Un trapano su Encelado ed Europa dovrà operare nel ghiaccio a temperature inferiori a 100 K, tenendo conto della bassa gravità su Encelado o dell'elevata radiazione superficiale su Europa. L'Auto-Gopher deve essere progettato per raggiungere i suoi obiettivi di penetrazione nel sottosuolo a grandi profondità, catturare campioni incontaminati, e consegnare quei campioni agli strumenti di bordo per l'analisi o per la potenziale restituzione del campione, il tutto nelle difficili condizioni incontrate nello spazio. Illustrazione del concetto di Auto-Gopher come perforazione profonda wireline.
L'obiettivo dello sforzo di sviluppo di Auto-Gopher è dimostrare una tecnologia scalabile che rende possibile la perforazione profonda utilizzando gli attuali veicoli di lancio e fonti di energia. Questo sviluppo tecnologico è stato realizzato in diverse generazioni, tra cui la perforatrice/corretrice a ultrasuoni/a ultrasuoni, Gopher ultrasonico/sonico, e l'Auto-Gopher-1. Nel 2015, PSD ha assegnato un progetto nell'ambito del suo programma MatISSE per supportare la prossima generazione di sviluppo della tecnologia Auto-Gopher:l'Auto-Gopher-2. Nel 2015, il progetto ha prodotto un interruttore principale e un meccanismo di ritenzione e ne ha dimostrato il funzionamento. Quest'ultimo trapano è stato progettato anche per ospitare l'elettronica, sensori, e meccanismi necessari per la perforazione autonoma, e i sottosistemi critici sono attualmente in fase di breadboard e test. Le future attività pianificate includono prove sul campo per convalidare l'operazione di perforazione in condizioni difficili in una cava di gesso negli Stati Uniti (il gesso può cambiare da gesso cristallino duro, al gesso tenero di zucchero, ad anidrite molto dura con numerose venature argillose) e all'interno di una camera a vuoto, perforazione in ghiaccio a circa -100°C.
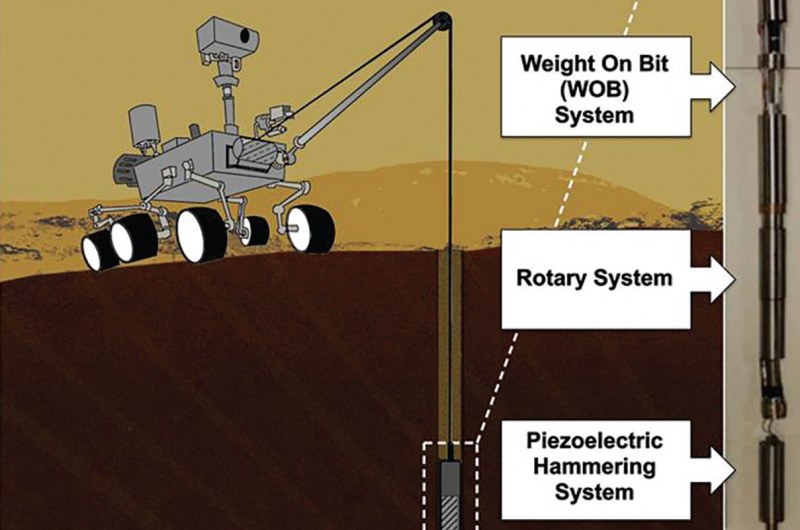
Illustrazione del concetto di Auto-Gopher come perforazione profonda wireline. Credito:NASA