L'esplorazione della Luna è diventata sempre più un punto focale ultimamente, soprattutto con una serie di lander recentemente lanciati con vari gradi di successo. Una delle difficoltà che questi lander e qualsiasi futura missione umana dovranno affrontare è comprendere il terreno su cui stanno atterrando e potenzialmente attraversando nel caso di un rover o di un essere umano. Per contribuire a combattere questo problema, un team di ricercatori svizzeri ha sviluppato un concetto di drone che potrebbe aiutare a mappare alcune delle aree più interessanti e potenzialmente pericolose da esplorare sulla luna.
La mappatura della Luna è già da anni una priorità. Tuttavia, alcune delle regioni più interessanti, come le regioni in ombra permanente (PSR) ai poli lunari che contengono una quantità significativa di ghiaccio d’acqua, sono state mappate solo con una risoluzione di circa 1 metro per pixel nelle immagini migliori. Ciò include il miglioramento artificiale da parte di algoritmi supportati dall'intelligenza artificiale.
Quel livello di risoluzione non è abbastanza vicino da fornire dati di pianificazione utili per qualsiasi potenziale rover o missione umana:la stessa ruota di un rover non sarà nemmeno più larga di quella, per non parlare della speranza di attraversare un ostacolo di quelle dimensioni. Di conseguenza, tutti i rover che inviamo devono essere controllati manualmente o farsi strada molto lentamente e in modo autonomo. Data la tempistica operativa limitata di queste missioni rover previste, quel ritmo lento potrebbe limitare la loro capacità di cercare risorse e siti preziosi che gli scienziati ritengono si nascondano nei PSR.
L’ovvia soluzione a questo problema è quella di avere un’altra forma di robot che serva da ricognitore, simile a quello che Ingenuity aveva fatto per il rover Perseverance su Marte fino a poco tempo fa. Quella collaborazione aveva permesso a Perseverance di stabilire il record per il viaggio autonomo di un giorno più lungo su un altro pianeta, per un totale di circa 700 m. Se uno scout fosse in grado di mappare i dettagli della superficie lunare di fronte a un potenziale rover, potrebbe muoversi ancora più velocemente del ritmo stabilito da Perseverance.
A tal fine, sono state pianificate numerose missioni per raggiungere questo obiettivo. In un recente articolo pubblicato su Acta Astronautica descrivendo la loro idea, Romeo Tonasso e i suoi colleghi dell'Ecole Polytechnique Federale de Lausanne hanno diviso questi concetti di missione esistenti in due categorie:grandi e piccole.
I sistemi più grandi possono contenere sistemi di propulsione chimica testati e standardizzati che, una volta testati in volo, possono essere ingombranti e utilizzare sostanze chimiche potenzialmente pericolose. I sistemi più piccoli potrebbero utilizzare diverse forme di propulsione chimica, come l'H2 O2 razzi, o mezzi di locomozione ancora più banali, come saltare letteralmente da terra usando le gambe. Tuttavia, molte delle tecnologie per questo tipo di propulsione non hanno ancora un livello di sviluppo sufficientemente elevato per essere utilizzate in una missione pratica.
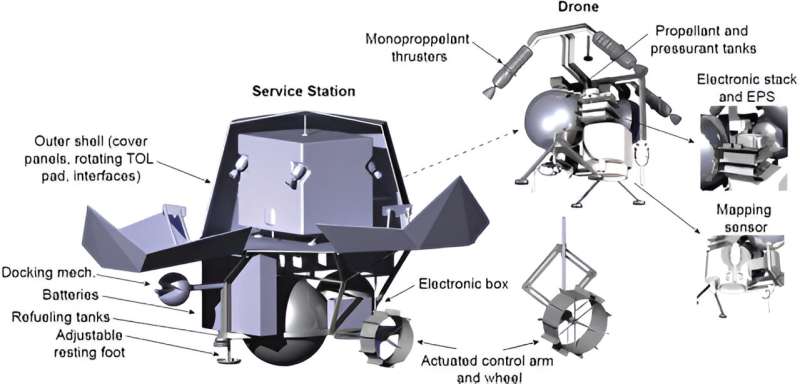
Trovare una via di mezzo tra il modello più vecchio e più pesante con la tramoggia e quello più nuovo e non testato è stato uno dei principali vincoli di progettazione per il nuovo concetto. La soluzione che hanno trovato è stata un drone con propulsione a razzo che sarebbe stato lanciato e fatto ritorno a una stazione base che avrebbe potuto essere trainato da un rover o da un altro veicolo di esplorazione lunare.
La stazione base rifornirebbe il drone dopo ogni volo, consentendogli di effettuare più voli senza trasportare un peso eccessivo di propellente. Con questa configurazione, il sistema potrebbe mappare fino a 9 chilometri quadrati della superficie lunare con una risoluzione che sarebbe utile sia per la pianificazione della missione del rover che per quella umana. Al termine di tale sforzo, la stazione base dovrebbe essere rifornita di carburante, consentendole di continuare la sua missione, che è una parte centrale del concetto di design.
Questa idea presenta altri vantaggi:molte altre tramogge devono atterrare al suolo e il loro sistema di propulsione può introdurre una notevole quantità di caos nell’ambiente lunare. Ciò è particolarmente indesiderabile se la superficie su cui stanno atterrando contiene materiali commercialmente validi come l'acqua ghiacciata. Il ritorno a una stazione di attracco mobile elimina inoltre qualsiasi sollevamento di polvere, che può ostacolare in modo significativo le operazioni in un'area, dato il tempo necessario alla polvere per depositarsi sulla luna.
Anche se nel documento sono presenti alcuni dettagli, tra cui alcune discussioni di alto livello sull'architettura che utilizza hardware testato nello spazio, finora questa idea è solo un concetto. Tuttavia, con la data dell’atterraggio umano dell’Artemis III che si avvicina rapidamente, la NASA e altre agenzie spaziali trarrebbero senza dubbio beneficio da una missione di ricognizione di successo come quella descritta nel documento. Resta però da vedere se riusciranno o meno a portare l'idea oltre il traguardo.
Ulteriori informazioni: Roméo Tonasso et al, Un drone da ricognizione lunare per l'esplorazione cooperativa e la mappatura ad alta risoluzione di luoghi estremi, Acta Astronautica (2024). DOI:10.1016/j.actaastro.2024.02.006
Fornito da Universe Today