Negli ultimi anni, con il significativo aumento delle attività di lancio nello spazio, il numero di veicoli spaziali deorbitati è aumentato notevolmente, determinando un grave impatto sia sui veicoli spaziali in orbita attivi che sulle future attività spaziali. I tradizionali sistemi di cattura con reti di corda, che fungono da tecnologia per deorbitare attivamente i veicoli spaziali, hanno un vasto potenziale nel mitigare e eliminare i detriti spaziali.
Tuttavia, i sistemi a fune devono affrontare sfide quali difficoltà nel mantenere la forma per periodi prolungati, suscettibilità all’autoaggrovigliamento, perdite di energia e riduzione dell’area di cattura effettiva. Al contrario, i film sottili possono piegarsi e svolgersi secondo forme regolari, offrendo maggiore flessibilità e affidabilità rispetto agli attacchi. Emergono come una soluzione efficace al problema dell'entanglement e presentano un metodo promettente per la mitigazione e la rimozione dei detriti spaziali.
In un articolo di revisione recentemente pubblicato su Space:Science &Technology , il team del professor Wei Cheng dell'Harbin Institute of Technology, in collaborazione con i ricercatori dell'Istituto di ingegneria di controllo di Pechino e dell'Università di Benha, ha progettato un sistema tascabile per l'acquisizione di film sottili.
Tuttavia, la struttura flessibile di questo sistema è soggetta a deformazioni e vibrazioni significative durante il movimento, con conseguenti notevoli interferenze con le operazioni del veicolo spaziale. Per analizzare quantitativamente questi disturbi, questo studio si concentra sulla modellazione dinamica e sul controllo dell'assetto del sistema di acquisizione tascabile a film sottile.
La ricerca prevede lo sviluppo di un controllore veloce della modalità di scorrimento terminale non singolare (FNTSM) e di un osservatore di dilatazione del tempo fisso (FxESO) integrati in una legge di controllo del tracciamento dell'assetto. L'efficacia del controller viene convalidata attraverso la creazione di un prototipo virtuale. Questa ricerca fornisce supporto teorico per la futura applicazione in orbita del sistema.
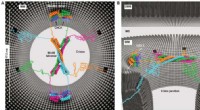
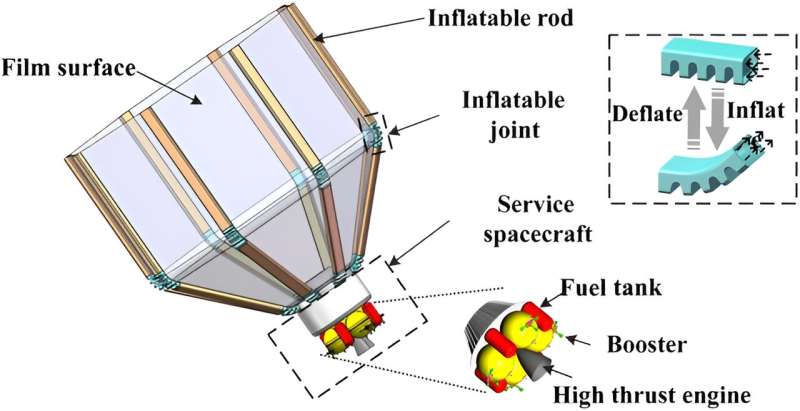
Innanzitutto, stabilire il modello del sistema delle tasche di cattura. Utilizzando una grande struttura a membrana flessibile supportata da aste gonfiabili, la parte superiore forma un prisma ottagonale, fornendo un ampio involucro per il meccanismo di cattura, mentre la parte inferiore assume una forma cilindrica.
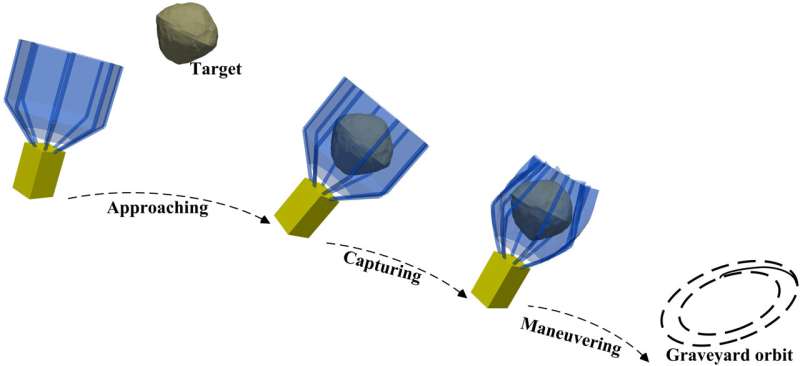
L'apertura e la retrazione del sistema si ottengono attraverso la regolazione del gonfiaggio e dello sgonfiaggio utilizzando giunti flessibili gonfiabili. Il processo di funzionamento del sistema è principalmente in 3 fasi. Innanzitutto, il sistema del veicolo spaziale viene guidato dal motore ad alta spinta per avvicinarsi al bersaglio catturato. Quindi, i giunti flessibili gonfiabili vengono gonfiati per avvolgere il bersaglio. Infine, la navicella spaziale di servizio manovra attivamente per trascinare il bersaglio catturato nell'orbita del cimitero.
Successivamente, utilizzare la formulazione delle coordinate nodali assolute (ANCF) per stabilire il modello dinamico del sistema di acquisizione tascabile a film sottile. Impiega elementi ANCF di ordine elevato con 8 nodi per descrivere il movimento della superficie del film, rappresentando il vettore di posizione globale attraverso polinomi di interpolazione Φi (xi , sìio ).
Descrivere la deformazione dei punti materiali utilizzando il tensore di deformazione di Green-Lagrange e sostituirlo nel tensore del gradiente del vettore di posizione globale J i per ricavare le equazioni del moto dell'elemento. Utilizzare il principio dei lavori virtuali per dedurre le equazioni cinematiche dell'elemento. Inoltre, introdurre il controller u , velocità angolare ω( ω) e quaternione unitario q .
Derivare le derivate degli errori di tracciamento dell'assetto, incluso l'errore di velocità angolare ω e e matrice di rotazione dell'assetto A qe . Infine, incorporando gli effetti del momento di inerzia della navicella J R e disturbo esterno d , ricavare le equazioni dinamiche dell'assetto della navicella.
Successivamente, l'autore, basandosi sul controllo della modalità di scorrimento non lineare, ha ideato una superficie FTSM (Fast Terminal Sliding Mode) F . Per prevenire problemi di singolarità in FTSM, una superficie F FNTSM (Fast Nonsingular Terminal Sliding Mode) è progettata quando |q ei | <ψ .
L'introduzione di un osservatore di stato esteso a tempo fisso (FxESO) comporta la progettazione di equazioni dinamiche per l'errore di osservazione, consentendo la stima delle incertezze. Infine, basato su FTNSM e FxESO, un controller per veicoli spaziali è progettato per raggiungere convergenza e stabilità in un tempo finito.
Successivamente, l'autore ha creato un prototipo virtuale e ha condotto analisi di simulazione numerica delle relative teorie dinamiche e di controllo. Lo studio ha rivelato che, dopo le manovre di assetto del veicolo spaziale, il sistema si è gradualmente stabilizzato.
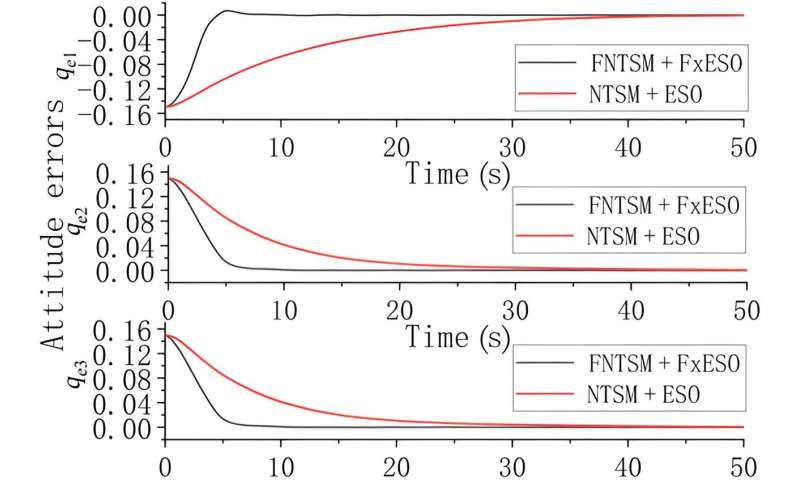
Tuttavia, c'erano ancora vibrazioni nelle aste flessibili, che impedivano il completo serraggio della membrana, con conseguenti grinze continue sulla superficie della membrana. Inoltre, il controller FNTSM + FxESO è stato confrontato con il controller Nonsingular Terminal Sliding Mode (NTSM) + Expansion Observer (ESO) e sono stati analizzati gli errori di assetto sotto questo controller.
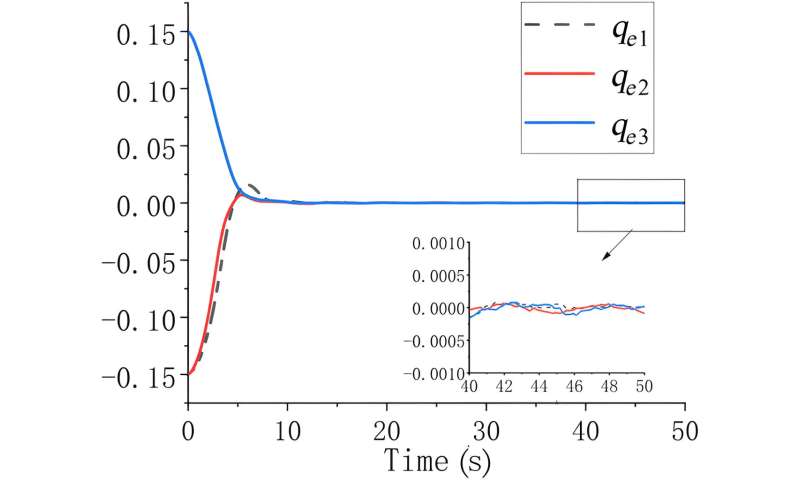
I risultati indicano che il controller FNTSM + FxESO porta la navicella spaziale all'assetto desiderato dopo 10 secondi, ovvero circa 25 secondi più velocemente rispetto al controller NTSM + ESO. Ciò migliora significativamente la velocità di convergenza dell'errore di assetto del sistema.
Inoltre, questo controller può sopprimere efficacemente le vibrazioni di ampiezza elevata, mantenendo l'errore di assetto stazionario sull'entità di 10 -4 . Ciò dimostra l'elevata efficienza, precisione e stabilità delle prestazioni del controller proposto.
Ulteriori informazioni: Zhuoran Huang et al, Dinamica e controllo FNTSM dei veicoli spaziali con un sistema tascabile per l'acquisizione di pellicole, Spazio:scienza e tecnologia (2023). DOI:10.34133/spazio.0079
Fornito da Beijing Institute of Technology Press Co., Ltd