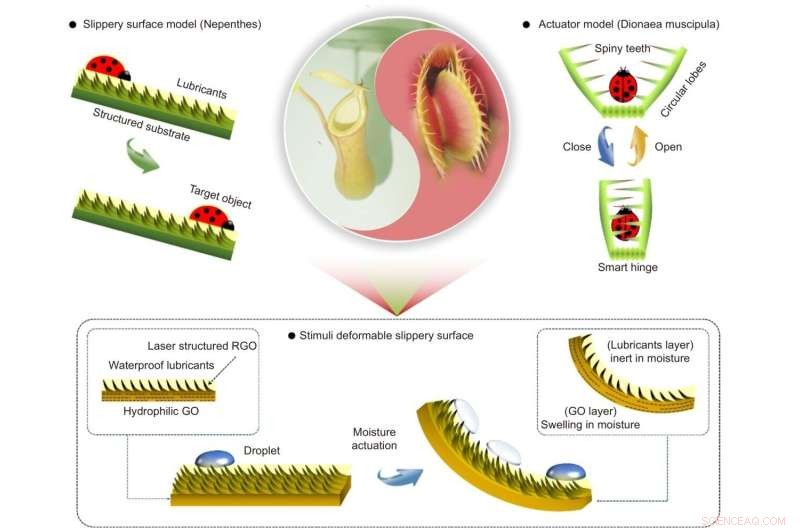
Concetto di base della superficie scivolosa che muta la forma e che risponde all'umidità bionica ibrida ispirata alle piante carnivore multiforme. La pianta carnivora Nepenthes cattura gli insetti passivamente con l'aiuto di una superficie scivolosa infusa di lubrificante. La Dionaea muscipula preda attivamente attraverso un meccanismo di attivazione sensibile agli stimoli. Abbiamo combinato le superfici scivolose (preda passiva) e l'attuazione reattiva agli stimoli (preda attiva), quindi abbiamo proposto un GO basato sulla superficie scivolosa deformabile dell'umidità bionica ibrida, che consente la manipolazione delle goccioline sia attiva che passiva. GO:ossido di grafene; RGO, GO ridotto. Credito:Compuscript Ltd
Una nuova pubblicazione da Opto-Electronic Advances discute come le piante carnivore ispirano superfici scivolose intelligenti e robot bionici.
Le piante carnivore hanno ispirato innovazioni di attuatori avanzati che rispondono agli stimoli e superfici scivolose infuse di lubrificante. Tuttavia, lo sviluppo di dispositivi bionici ibridi che combinano le capacità di cattura delle prede attive e passive delle piante carnivore rimane impegnativo. Il team di ricerca ha sviluppato una superficie scivolosa che reagisce all'umidità e muta la forma. Hanno integrato una superficie scivolosa infusa di lubrificante con un attuatore a doppio strato LRGO/GO. Il team ha preparato una serie di attuatori proof-of-concept, tra cui una lingua di rana intelligente e un fiore intelligente, che dimostrano l'intrappolamento attivo/passivo, la manipolazione delle goccioline e il rilevamento.
Le piante carnivore possono intrappolare e digerire piccoli insetti attraverso sofisticati meccanismi di attivazione o bagnabilità superficiale unica. Questa capacità ha ispirato lo sviluppo di superfici/dispositivi intelligenti artificiali per applicazioni ingegneristiche, come superfici antigelo, anti-biofouling, condensazione delle goccioline e manipolazione delle goccioline. L'imitazione dei loro comportamenti di cattura ha portato a strategie innovative per la progettazione di superfici sintetiche, attuatori e robot.
In generale, il meccanismo di cattura delle piante carnivore differisce tra le diverse specie, che possono essere classificate in due categorie:cattura attiva e cattura passiva. Tuttavia, i dispositivi bionici ibridi che combinano i pregi dei due distinti tipi di piante carnivore, con capacità di cattura sia positive che passive, sono ancora rari. La combinazione di attuatori ispirati alla muscipula di Dionaea con una superficie scivolosa che imita la pianta della brocca di Nepenthes è vantaggiosa sia per il design dell'attuatore che per lo sviluppo di una superficie intelligente con super bagnabilità. Tuttavia, è difficile raggiungere questo obiettivo.
Femtosecond laser direct writing (FsLDW) induced photoreduction and simultaneous structuring to prepare a GO and LRGO bilayer actuator that enables dynamic deformation under moisture actuation. After that, a lubricant-infused slippery surface was integrated with the graphene actuator by immobilizing lubricant at the LRGO side through the capillary forces.
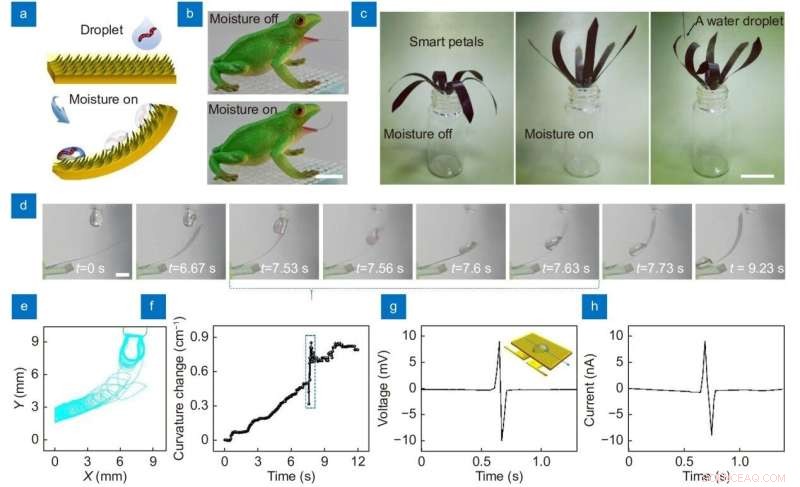
The manipulation of droplets on moisture responsive shape-morphing slippery surface. (a) Schematic illustration for the active and passive manipulation of a droplet containing live tubificidaes using the shape-morphing slippery surface. (b) The photographs of shape-morphing slippery frog tongue. The scale bar is 1.5 cm. (c) A smart water droplet harvesting flower. Every flower petal is made of the shape-morphing slippery surface (oil-LRGO/GO). The scale bar is 1.5 cm. (d) Moisture triggered active approach to water droplets containing live tubificidaes and the passive sliding behavior on the shape-morphing slippery surface. The scale bar is 0.5 cm. (e) The corresponding trajectory of the water droplet peripheries during the dynamic process. (f) The curvature changes of the shape-morphing slippery surface in (d). (g) The open-circuit voltage and (h) short-circuit current. Credito:Compuscript Ltd
The two types of carnivorous plants demonstrate distinct strategies for trapping prey. Nepenthes pitcher plants catch insects through a passive trapping mechanism with the help of lubricants-infused slippery surfaces. In contrast, Dionaea muscipula performs an active trapping behavior through a sophisticated actuating mechanism. The concept of the hybrid bionic model is the combination of the two tapping behaviors within one synthetic smart surface here, which the research team called a stimuli deformable slippery surface.
Traditional stimuli-responsive actuators enable reversible deformation under external stimuli. They reveal the great potential for developing trapping robots. However, in most cases, simple bending deformation cannot trap insects because of the slow response to environmental stimuli or the lack of surface wettability control. The team combined the moisture-responsive actuator with a lubricant-infused slippery surface together. The combined effect of actuation and slippery property endows the oil-infused LRGO/GO film with enhanced trapping ability.
The research team demonstrated a moisture-responsive shape-morphing slippery surface that can contact droplets actively and let them slide away passively. Based on this hybrid bionic concept, a smart frog tongue that can catch and manipulate droplets containing live tubificidaes is prepared. Notably, the slippery surface can bend under moisture actuation, get in touch with the droplet, and let it slide to the bottom, demonstrating both active catching and passive trapping capabilities.
In conclusion, the in-situ integration of the lubricant-infused slippery surface with the bilayer actuator does not degrade the actuating performance. It also improves its deformation degrees under moisture actuation. The presence of an oil layer can entirely prevent the transmission of water molecules through the LRGO side, and selective water adsorption only occurs within the GO layer. As a result, the oil-LRGO/GO actuator demonstrated large deformation curvature, short response/recovery time, and improved stability. For practical applications, laser interference ablation that uses an interference effect for periodical patterning is more effective. The significance of this work lies in the fabrication of a shape-morphing slippery surface with hybrid bionic functionalities of both stimuli-responsive deformation and oil-lubricated slippery properties.
The combination of shape-morphing ability with the slippery surface benefits both actuating performance and the usefulness of a smart surface with super wettability. It leads to new applications, such as droplet collection, manipulation, and rainfall sensing. Moisture-responsive actuators can directly harness energy from naturally occurring or engineered evaporation from water. That can subsequently be converted to mechanical energy or electricity, such as weather-responsive architectural systems, smart textiles, and soft robots. The cross-species bio-inspired materials benefit both actuator design and the development of smart surfaces with super wettability. The moisture-responsive shape-morphing slippery surface reveals great potential for developing bionic robots. + Esplora ulteriormente