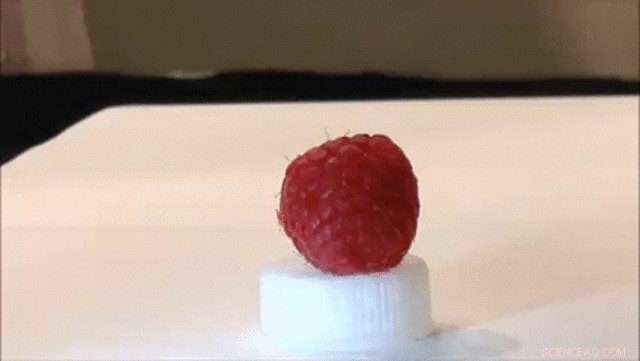
I ricercatori di Stanford hanno sviluppato il sensore simile alla pelle sulla punta del dito di questa mano robotica, e programmato per toccare il frutto senza danni. Un giorno sperano di creare sistemi di controllo per consentire a un robot di percepire le caratteristiche degli oggetti e calcolare autonomamente quanta forza applicare. Credito:il Bao Lab
Gli ingegneri di Stanford hanno sviluppato un guanto elettronico contenente sensori che un giorno potrebbe dare alle mani robotiche il tipo di destrezza che gli umani danno per scontata.
In un articolo pubblicato il 21 novembre in Robotica scientifica , L'ingegnere chimico Zhenan Bao e il suo team hanno dimostrato che i sensori funzionano abbastanza bene da consentire a una mano robotica di toccare una bacca delicata e maneggiare una pallina da pingpong senza schiacciarla.
"Questa tecnologia ci mette sulla strada per un giorno dare ai robot il tipo di capacità di rilevamento che si trova nella pelle umana, " ha detto Bao.
Bao ha detto che i sensori nella punta delle dita del guanto misurano simultaneamente l'intensità e la direzione della pressione, due qualità essenziali per raggiungere la manualità. I ricercatori devono ancora perfezionare la tecnologia per controllare automaticamente questi sensori, ma quando lo fanno, un robot che indossa il guanto potrebbe avere la destrezza di tenere un uovo tra pollice e indice senza romperlo o farlo scivolare.
Elettronica che imita la vita
Il guanto elettronico imita il modo in cui gli strati della pelle umana lavorano insieme per dare alle nostre mani la loro straordinaria sensibilità.
Il nostro strato esterno della pelle è impregnato di sensori per rilevare la pressione, calore e altri stimoli. Le nostre dita e i nostri palmi sono particolarmente ricchi di sensori tattili. Questi sensori funzionano in combinazione con un sottostrato di pelle chiamato spinoso, un terreno accidentato e microscopico di colline e valli.
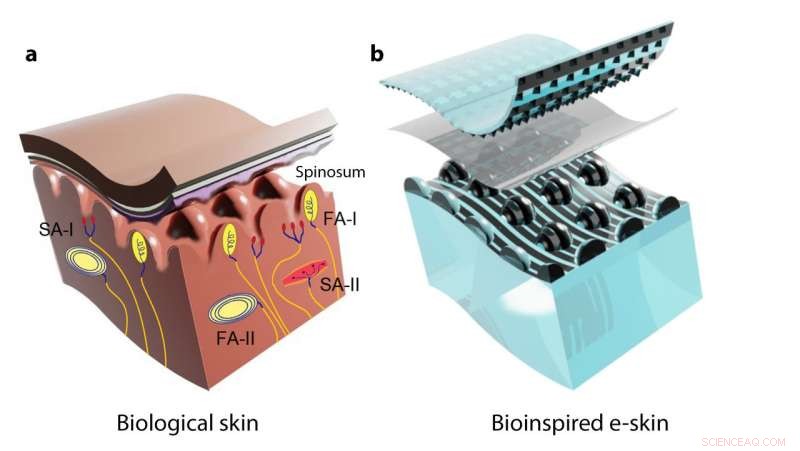
Una sezione trasversale della pelle umana dal polpastrello raffigurante strutture sensoriali chiave (a sinistra). Questa struttura è servita come ispirazione per il design dell'e-skin (a destra). Credito:Boutry et al., Sci. Robot . 3, eaau6914 (2018)
Quella irregolarità è fondamentale. Quando il nostro dito tocca un oggetto, lo strato esterno della pelle si avvicina allo spinoso. Un tocco leggero è avvertito principalmente dai sensori vicino alle cime delle colline. Una pressione più intensa spinge la pelle esterna nelle valli dello spinoso, innescando sensazioni tattili più intense.
Ma misurare l'intensità della pressione è solo una parte di ciò che lo spinoso consente. Questo sottostrato irregolare aiuta anche a rivelare la direzione della pressione, o forza di taglio. Un dito che preme il nord per esempio, crea forti segnali sulle pendici meridionali di quelle microscopiche colline. Questa capacità di percepire la forza di taglio fa parte di ciò che ci aiuta a tenere delicatamente ma saldamente un uovo tra il pollice e l'indice.
La studiosa post-dottorato Clementine Boutry e lo studente di master Marc Negre hanno guidato lo sviluppo dei sensori elettronici che imitano questo meccanismo umano. Ogni sensore sulla punta del dito del guanto robotico è composto da tre strati flessibili che lavorano in concerto. Gli strati superiore e inferiore sono elettricamente attivi. I ricercatori hanno posato una griglia di linee elettriche su ciascuna delle due superfici affacciate, come righe in un campo, e ha girato queste righe perpendicolari l'una all'altra per creare una fitta serie di piccoli pixel di rilevamento. Hanno anche reso lo strato inferiore irregolare come lo spinoso.
L'isolante in gomma al centro ha semplicemente tenuto separati gli strati superiore e inferiore degli elettrodi. Ma quella separazione era critica, perché gli elettrodi che sono vicini senza toccarsi possono immagazzinare energia elettrica. Mentre il dito robotico premeva, stringendo gli elettrodi superiori più vicino al fondo, l'energia immagazzinata è aumentata. Le colline e le valli dello strato inferiore hanno fornito un modo per mappare l'intensità e la direzione della pressione in punti specifici sulle griglie perpendicolari, molto simile alla pelle umana.
Tocco delicato
Per testare la loro tecnologia, i ricercatori hanno posizionato i sensori a tre strati sulle dita di un guanto di gomma, e metti il guanto su una mano robotica. Alla fine l'obiettivo è incorporare i sensori direttamente in una copertura simile alla pelle per le mani robotiche. In un esperimento, hanno programmato la mano robotica che indossava i guanti per toccare delicatamente una bacca senza danneggiarla. Hanno anche programmato la mano guantata per sollevare e spostare una pallina da pingpong senza schiacciarla, utilizzando il sensore per rilevare la forza di taglio appropriata per afferrare la palla senza farla cadere.
Bao ha affermato che con una corretta programmazione una mano robotica che indossa l'attuale guanto sensibile al tocco potrebbe svolgere un compito ripetitivo come sollevare le uova da un nastro trasportatore e metterle in cartoni. La tecnologia potrebbe avere applicazioni anche nella chirurgia assistita da robot, dove il controllo tattile preciso è essenziale. Ma l'obiettivo finale di Bao è sviluppare una versione avanzata del guanto che applichi automaticamente la giusta quantità di forza per maneggiare un oggetto in sicurezza senza previa programmazione.
"Possiamo programmare una mano robotica per toccare un lampone senza schiacciarlo, ma siamo molto lontani dall'essere in grado di toccare e rilevare che è lampone e consentire al robot di raccoglierlo, " lei disse.