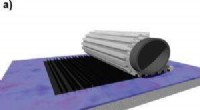
Questa figura mostra un braccio robotico idraulico a sette assi che rompe lastre di cemento, ogni 30 mm di spessore. Questo è un prototipo per il confronto con un robot a quattro zampe sviluppato anche in questo progetto dalla Waseda University, Università Meiji, e altri, prodotto all'incirca della stessa dimensione. Si compone di sette dei nuovi motori idraulici. Credito:Laboratorio Suzumori
I ricercatori del Tokyo Institute of Technology (Tokyo Tech) hanno sviluppato un attuatore idraulico che consentirà a robot robusti di operare in siti disastri e altri ambienti difficili. La Tokyo Tech Venture H-MUSCLE Corporation è stata costituita per perseguire applicazioni per l'attuatore, e la spedizione dei campioni di prodotto inizierà a febbraio 2019.
La maggior parte dei robot odierni è azionata da motori elettrici, ma attuatori idraulici, con il loro alto rendimento e resistenza agli urti, sarebbe adatto a robot che operano in ambienti difficili. Però, tipici attuatori idraulici sono sviluppati per macchinari industriali, come pale elettriche, e sono troppo grandi e pesanti per essere utilizzati nei robot; né possono fornire un movimento regolare o il controllo della forza.
Il professore della Tokyo Tech School of Engineering Koichi Suzumori e colleghi hanno sviluppato un attuatore idraulico per risolvere questi problemi. L'attuatore offre potenza e resistenza agli urti notevolmente superiori rispetto ai motori elettrici convenzionali. Garantisce anche una dimensione più piccola, maggiore potenza (rapporto forza-massa), e un controllo più fluido rispetto agli attuatori idraulici convenzionali. Fornendo un'elevata potenza, durata, e ottimo controllo, l'attuatore consentirà ai robot di operare negli ambienti più difficili ed eseguire lavori pesanti con un tocco delicato.
Questo attuatore idraulico è il risultato della Tough Robotics Challenge, organizzato dall'Impulsing Paradigm Change through Disruptive Technologies Program (ImPACT) del Cabinet Office of Japan. Tecnologia di Tokyo; JPN Co., srl; Bridgestone Corporation; e KYB Corporation; insieme ad altre università e imprese che si occupano di attrezzature idrauliche, hanno partecipato allo sviluppo dell'attuatore idraulico per robot robusti dal 2014. Per promuovere l'adozione della tecnologia, H-MUSCLE spedirà campioni dei suoi cilindri idraulici e motori idraulici a produttori nazionali, espandere la propria gamma di attuatori per la vendita futura, ed esplorare ulteriori applicazioni.
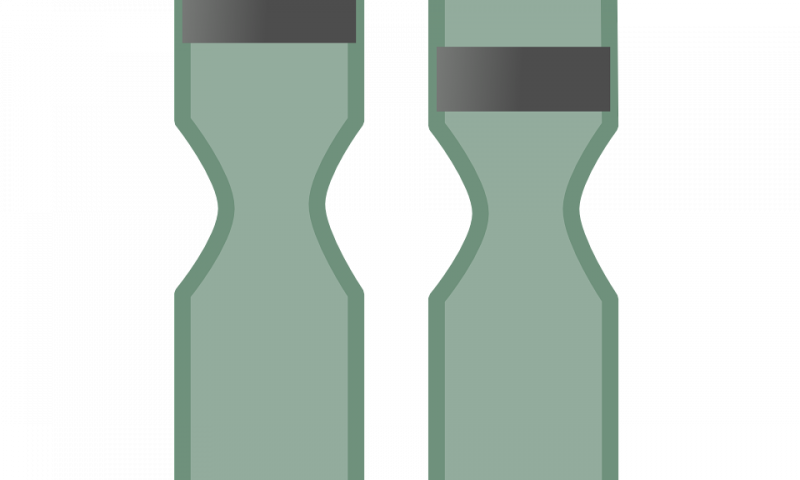
Un piccolo, leggero, motore scorrevole. Credito:laboratorio Suzumori
Sfondo
La sfida della robotica ImpACT Tough (2014-2018, Responsabile del programma:Satoshi Tadokoro, Professoressa, Tohoku University) ha condotto ricerche con l'obiettivo di creare robot per operazioni difficili, anche in siti di disastri estremi. Come parte di questo progetto, gli attuatori idraulici specifici per i robot e la loro applicazione robotica sono stati fissati come tema di ricerca. Koichi Suzumori (robotica, ingegneria attuatori) a Tokyo Tech è stato il leader del gruppo con i partecipanti Tokyo Tech; Università di Okayama; Università Ritsumeikan, JPN Co., srl; Bridgestone Corporation; e KYB Corporation. Con la collaborazione di molte altre imprese con tecnologie altamente specializzate, sono riusciti a sviluppare un attuatore per robot idraulici di piccole dimensioni, leggero, alto rendimento, e scorrevole, qualcosa non disponibile nei prodotti esistenti.
Meriti del piccolo, leggero, attuatori a scorrimento liscio
Il nuovo attuatore idraulico offre i seguenti progressi rispetto agli attuatori idraulici esistenti.
ImPACT ha costruito diversi prototipi di robot robusti per testare potenziali applicazioni per l'attuatore idraulico.
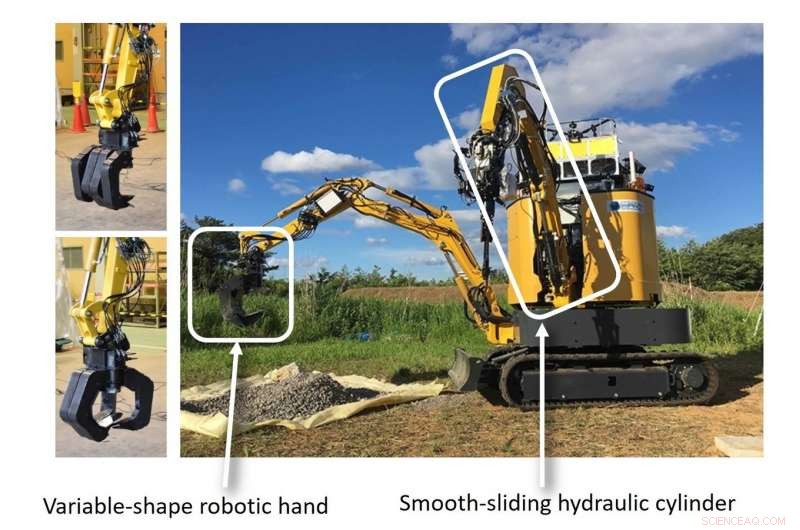
Un robot da costruzione sviluppato da Komatsu, Università di Osaka, e altri. Il più piccolo dei due bracci è azionato da cilindri scorrevoli sviluppati in questo programma, contribuendo alla sua capacità di eseguire manipolazioni fini. L'estremità dell'altro braccio è dotata di una mano idraulica che utilizza il nuovo attuatore idraulico. Con quattro dita, può essere utilizzato in modalità pala o modalità manuale, se necessario. In modalità mano, può afferrare oggetti di forme diverse e controllare la forza della presa. Credito:Komatsu, Università di Osaka, Istituto di tecnologia di Tokyo