Il robot QUALSIASI. Credito:Hwangbo et al., Sci. Robot. 4, eaau5872 (2019)
Un team di ricercatori con Robotic Systems Lab in Svizzera e Intelligent Systems Lab in Germania e negli Stati Uniti ha trovato un modo per applicare l'apprendimento automatico alla robotica per dare a tali macchine maggiori capacità. Nel loro articolo pubblicato sulla rivista Robotica scientifica , il gruppo descrive come hanno applicato l'apprendimento automatico alla robotica e così facendo hanno dato a un robot simile a un cane più agilità e velocità.
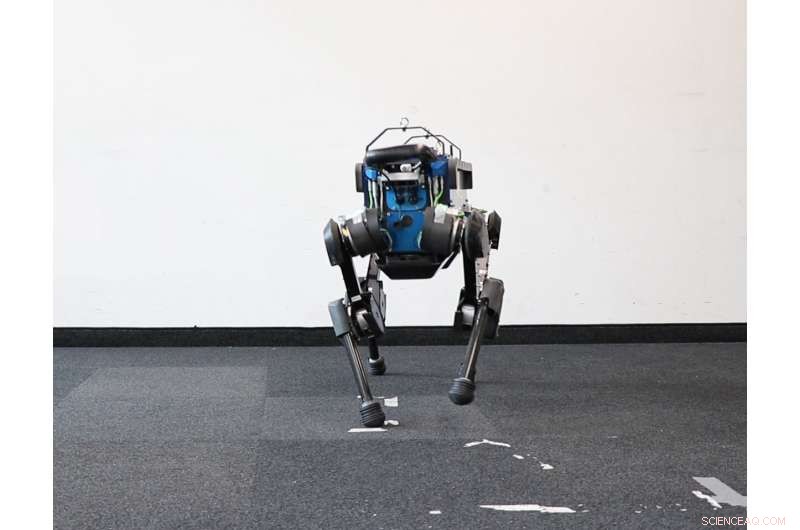
L'apprendimento automatico è stato molto nelle notizie ultimamente, poiché tali sistemi continuano a insinuarsi nelle capacità umane dando loro capacità senza precedenti. In questo nuovo sforzo, i ricercatori hanno cercato di applicare parte dello stesso miglioramento a un robot simile a un cane chiamato ANYmal, una macchina slegata delle dimensioni di un grosso cane che può camminare in modi molto simili a quelli di un vero animale. ANYmal è stato originariamente creato da un team del Robotic Systems Lab ed è stato commercializzato. Ora l'azienda ha stretto una partnership con Intelligent Systems Lab per dare al robot la capacità di imparare a fare le cose che fa attraverso la pratica, piuttosto che attraverso la programmazione.
L'apprendimento automatico funziona impostando obiettivi per un sistema e quindi fornendogli un mezzo per testare i modi per raggiungere tali obiettivi, migliorando continuamente man mano che vengono raggiunti i benchmark. Il test è fatto più e più volte, a volte migliaia di volte. Tali test sono difficili con un robot sia a causa dei molti fattori coinvolti (come tutti gli attributi coinvolti nel mantenimento dell'equilibrio) sia a causa dell'enorme investimento di tempo. Dopo aver trovato un modo per affrontare il primo problema, i ricercatori hanno trovato un modo per aggirare il secondo. Invece di avere QUALSIASI lotta contro il suo regime di apprendimento nel mondo reale, i ricercatori hanno creato una versione virtuale del robot che potrebbe funzionare su un semplice computer desktop.
I ricercatori osservano che consentire al robot di apprendere mentre era nella sua incarnazione virtuale era circa 1000 volte più veloce di quanto sarebbe stato nel mondo reale. Hanno lasciato che il cane virtuale si addestrasse per un massimo di 11 ore e poi scaricavano i risultati sul robot fisico. I test hanno mostrato che l'approccio ha funzionato molto bene. La versione nuova e migliorata di ANYmal era più agile (in grado di impedire a un umano di calciarlo e di raddrizzarsi se cade) e correva circa il 25% più velocemente.
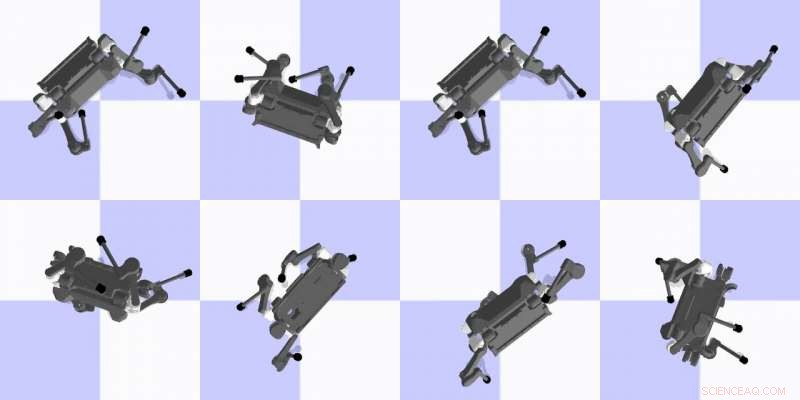
Diverse configurazioni di caduta del robot ANYmal. Credito:Hwangbo et al., Sci. Robot. 4, eaau5872 (2019)
© 2019 Science X Network