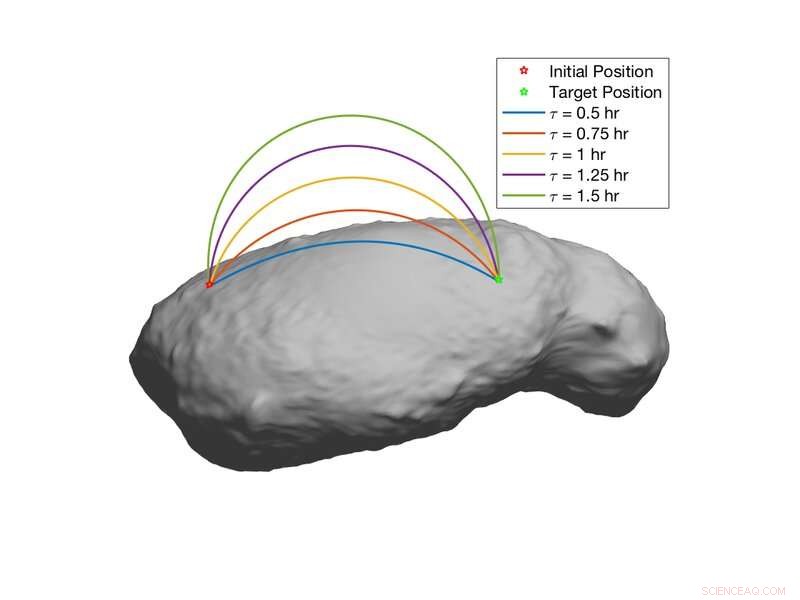
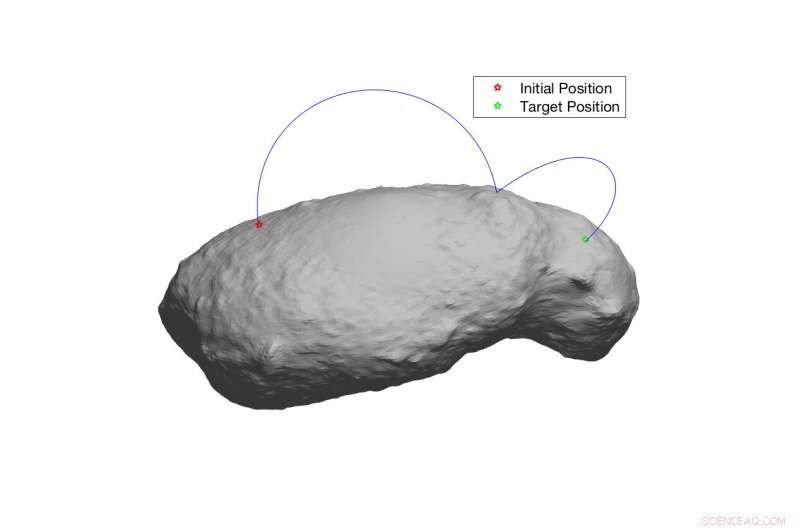
Traiettorie saltellanti dalla posizione iniziale a una posizione target sulla superficie di Itokawa. Credito:Kalita &Thangavelautham.
Gli asteroidi sono piccoli, corpi rocciosi orbitanti intorno al sole che sono troppo piccoli per essere chiamati pianeti. Ci sono milioni di asteroidi nel sistema solare, di dimensioni variabili, forma e composizione. L'esplorazione degli asteroidi potrebbe aiutare a scoprire affascinanti informazioni sull'origine del sistema solare, del pianeta Terra, e della vita stessa.
Gli asteroidi potrebbero anche fungere da punti strategici per la scienza planetaria, estrazione di risorse, relè di comunicazione o difesa planetaria. Finora, però, esplorare le superfici degli asteroidi si è rivelato molto impegnativo a causa del loro campo gravitazionale basso e altamente non lineare.
Recenti missioni di asteroidi, come Hayabusa II e OSIRIS-Rex erano semplicemente operazioni di passaggio o touch-and-go. I ricercatori hanno quindi cercato di sviluppare una tecnologia che consentisse l'esplorazione delle superfici degli asteroidi, ad esempio, utilizzando strumenti in situ per analizzare la loro composizione e il materiale sotto la superficie.
I robot saltellanti potrebbero essere particolarmente utili per l'esplorazione di tali superfici, poiché la mobilità attraverso salti balistici presenta numerosi vantaggi in presenza di campi gravitazionali irregolari. Questi tipi di robot possono percorrere grandi distanze su terreni accidentati, con dispendio energetico contenuto. Un team di ricercatori dell'Università dell'Arizona ha recentemente sviluppato dinamiche balistiche di salto e un nuovo approccio per la pianificazione del movimento sulle superfici degli asteroidi.
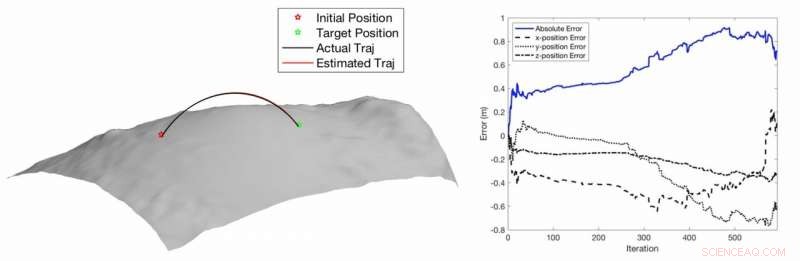
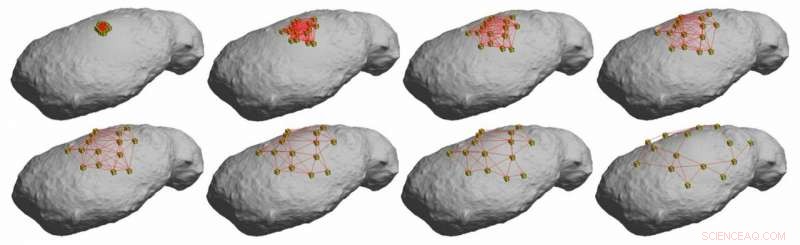
Auto-localizzazione utilizzando la corrispondenza della scansione della nuvola di punti 3D. Credito:Kalita &Thangavelautham.
"A differenza della Terra, la gravità dell'asteroide è bassa, poiché questi rover saltellanti sono più adatti, poiché possono percorrere grandi distanze su terreni arbitrariamente accidentati con il dispendio di poca energia, " Himangshu Kalita, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Però, la loro forma irregolare si traduce in un campo gravitazionale altamente irregolare, il che rende il salto altamente incerto. Così, è necessaria un'architettura sequenziale per l'autonomia del rover hopping in grado di pianificare in anticipo prima di eseguire qualsiasi hop e contemporaneamente localizzarsi."
L'approccio ideato da Kalita e dal suo collega Jekan Thanga calcola la velocità necessaria per intercettare un bersaglio e quindi localizza il robot saltellante. Per localizzare il robot, i ricercatori hanno impiegato metodi di stima della posa basati sulla corrispondenza delle scansioni successive utilizzando uno scanner laser 3D.
Le informazioni raccolte vengono successivamente utilizzate per pianificare il movimento del robot saltellante sulla superficie dell'asteroide bersaglio. Il robot dovrebbe eseguire più salti per raggiungere una posizione desiderata sull'asteroide, evitando anche gli ostacoli.
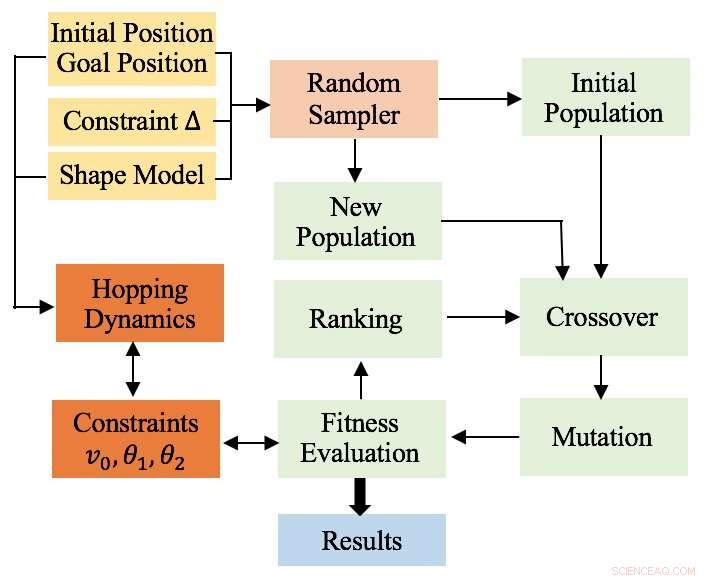
Schema del pianificatore di percorso ottimizzato utilizzando l'algoritmo evolutivo. Credito:Kalita &Thangavelautham.
"L'architettura di pianificazione del movimento discussa nel documento può trovare traiettorie quasi ottimali affinché un rover saltellante raggiunga una posizione target dalla sua posizione iniziale sulla superficie di un asteroide con campi gravitazionali irregolari, " Kalita ha spiegato. "Il nostro approccio utilizza un modello dinamico ad alta fedeltà per eseguire la valutazione di tentativi ed errori nella simulazione delle manovre candidate per determinarne l'idoneità. La valutazione per tentativi ed errori tiene conto del rischio, ricompense e incertezze locali”.
Molti asteroidi sono ricchi di risorse come l'acqua, composti di carbonio, ferro e metalli del gruppo del platino. Alcuni asteroidi contengono anche resti di pianeti esistenti e potrebbero quindi fungere da "capsule temporali", fornendo registrazioni incontaminate della prima geologia e geostoria di tali pianeti. L'esplorazione di questi asteroidi potrebbe offrire preziose informazioni sull'origine del sistema solare e dei pianeti in esso contenuti. Nel futuro, l'approccio ideato da Thanga e Kalita potrebbe aprire la strada all'esplorazione delle superfici degli asteroidi, portando a interessanti osservazioni e scoperte.
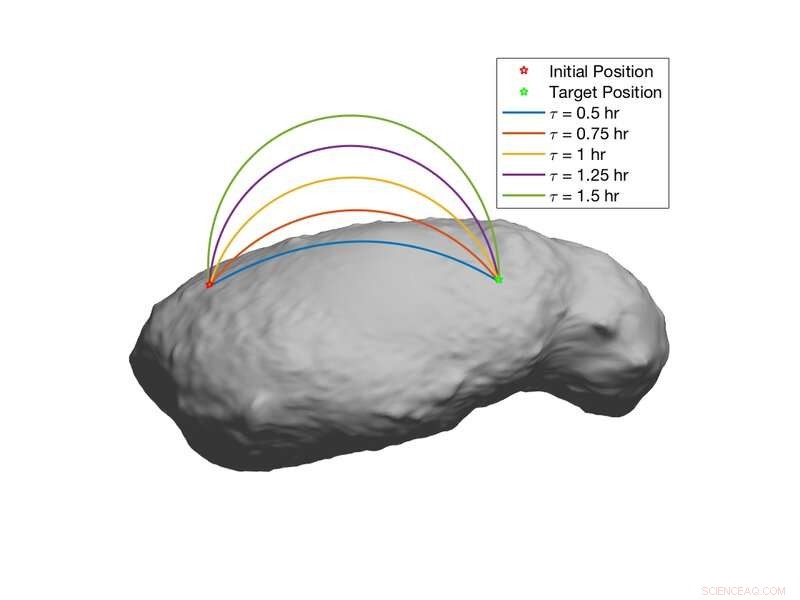
Traiettoria ottimale generata dal pianificatore di percorso per raggiungere una posizione target. Credito:Kalita &Thangavelautham.
Diversi rover esplorano la superficie dell'asteroide Itokawa in modo cooperativo. Credito:Kalita &Thangavelautham.
Traiettorie saltellanti dalla posizione iniziale a una posizione target sulla superficie di Itokawa. Credito:Kalita &Thangavelautham.
"L'osservazione in volo e a lungo raggio degli asteroidi è insufficiente per determinare cosa c'è sotto lo strato superiore degli asteroidi, " Thanga ha detto. "Il nostro approccio, che comporta l'esecuzione di salti balistici per l'esplorazione di superficie di asteroidi, può rispondere a queste domande. Inoltre, i rover schierati sulle superfici degli asteroidi fino ad oggi si affidano a una nave madre per la localizzazione, ma il loro incontro è raro. Le nostre simulazioni mostrano che utilizzando un sensore di mappatura 3D a bordo, i rover possono eseguire l'autolocalizzazione indipendente dalla nave madre che è un precursore dell'autonomia del rover."
L'approccio ideato da Thanga e Kalita è progettato per pianificare efficacemente il movimento di un robot saltellante su lunghe distanze, su superfici di asteroidi con campi gravitazionali irregolari. Lo stesso approccio potrebbe essere applicato a più robot coordinati che esplorano simultaneamente la superficie di un determinato asteroide. I ricercatori hanno anche esteso il loro metodo per calcolare diverse traiettorie ottimali, che consentirebbe a un robot di raggiungere un obiettivo desiderato mentre visita più waypoint.
"Stiamo ora sviluppando prototipi per hopping rover miniaturizzati che utilizzeranno propellenti a base di sublimazione per l'hopping, " disse Kalita. "Con campi di gravità irregolari simulati, saremo in grado di testare il nostro approccio per trovare traiettorie saltellanti".
© 2019 Science X Network