Credito:Ashby et al.
I ricercatori dell'Auckland Bioengineering Institute e della Technische Universität Dresden hanno recentemente progettato un nuovo tipo di robot gonfiabile per la navigazione spaziale. Questi robot, presentato in un articolo pubblicato su SPIE Digital Library, sono stati creati utilizzando trasduttori in elastomero dielettrico (DET), che sono essenzialmente condensatori elettrici realizzati con materiali gommosi morbidi.
"L'attuale tecnologia spaziale è limitata dalla sua massa e volume. Ci vogliono migliaia di dollari per lanciare in orbita anche un solo chilogrammo, "Giuseppe Ashby, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "La nostra ricerca mira a sostituire o aumentare la tecnologia attuale con sostituzioni di materiali intelligenti più leggeri combinati con strutture gonfiabili".
Se sono integrati con strutture gonfiabili, I DET potrebbero aiutare lo sviluppo di robot morbidi e di piccola massa, che hanno un'elevata efficienza di confezionamento e sono facili da implementare. Infatti, I DET si deformano quando viene applicata loro una tensione, dovuto alla sollecitazione di Maxwell generata dal campo elettrico.
A differenza dei motori elettrici tradizionali, questi condensatori consentono ai ricercatori di produrre un'ampia gamma di movimenti e forze senza complessi, meccanismi di ingranaggi pesanti. I DET possono anche essere usati come sensori di deformazione monitorando i loro cambiamenti di capacità mentre vengono allungati. Ciò significa che hanno anche un vantaggio autosensoriale senza la necessità di sistemi di monitoraggio esterni.
"Poiché sono realizzati interamente con materiali morbidi, Le strutture DET possono essere gonfiate come un pallone, " ha spiegato Ashby. "Ciò significa che possono formare grandi strutture quando vengono schierate, ma può essere imballato in piccoli spazi in anticipo, che li rende candidati ideali per applicazioni spaziali, dove le capacità di lancio sono limitate in termini di volume."
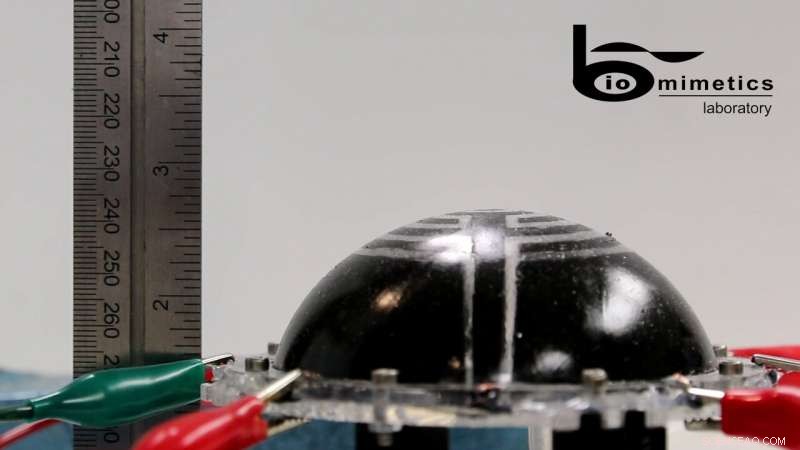
Nel loro studio, Ashby ei suoi colleghi hanno studiato i movimenti ottenuti dall'attuazione di tre disegni sperimentali. Nel primo di questi disegni, l'attuatore a cupola del robot è costituito da un foglio di gomma siliconica con elettrodi segmentati.

Credito:Ashby et al.
Il secondo disegno è simile, ma con un allungamento dell'attuatore a cupola per produrre movimento locomotorio dall'azionamento in fasi di segmenti. Finalmente, il terzo è un design cilindrico laminato con variazioni nella geometria della cucitura, posizione e composizione degli elettrodi, che ha permesso ai ricercatori di ottenere più movimenti risonanti e non risonanti.
"Su larga scala, consentendo il dispiegamento di grandi strutture capaci di movimento e/o auto-sorveglianza sanitaria a bassa massa, veicoli di lancio a basso volume, saremmo in grado di espandere le nostre capacità di esplorazione spaziale, " Ashby ha detto. "Su un focus più ristretto, dare ai satelliti più piccoli (di crescente popolarità) la possibilità di dispiegare e controllare antenne o array che altrimenti sarebbero troppo grandi per le loro dimensioni darebbe loro capacità di comunicazione e alimentazione notevolmente migliorate".
Ashby e i suoi colleghi hanno modellato ciascuno dei loro progetti utilizzando il software FEM disponibile in commercio e poi li hanno testati in simulazioni mentre venivano sottoposti a gonfiaggio e attuazione. Sebbene i loro esperimenti abbiano prodotto risultati promettenti, i robot sono ancora nelle primissime fasi di sviluppo.
Affinché la loro tecnologia diventi un'alternativa fattibile agli attuali attuatori spaziali, i ricercatori devono ancora superare una serie di sfide chiave. Per esempio, il funzionamento dei DET nello spazio si è finora dimostrato poco pratico a causa di una serie di complesse condizioni ambientali.
"Ora abbiamo in programma di continuare a sviluppare i nostri prototipi esistenti, ma esplora anche altri possibili design per una varietà di applicazioni diverse, " ha detto Ashby. "Stiamo anche lavorando allo sviluppo di metodi di schermatura per proteggere i nostri robot dal duro ambiente spaziale".
© 2019 Scienza X Rete