Questo risultato della ricerca mostra che i robot possono essere insegnati intuitivamente a essere flessibili dagli esseri umani, in quanto non è stato realizzato attraverso il calcolo numerico o la programmazione dei movimenti del robot. Credito:Korea Institute of Science and Technology (KIST)
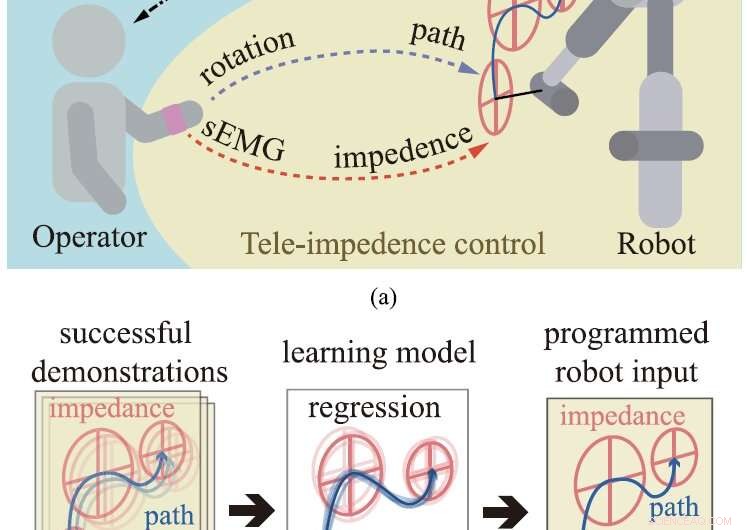
Il team del Dr. Kee-hoon Kim presso il Center for Intelligent &Interactive Robotics del Korea Institute of Science and Technology (KIST) ha sviluppato un modo di insegnare "robot controllati dall'impedenza" attraverso dimostrazioni umane utilizzando elettromiogrammi di superficie (sEMG) dei muscoli, e riuscì a insegnare a un robot a intrappolare una palla caduta come un giocatore di calcio. Un elettromiogramma di superficie è un segnale elettrico prodotto durante l'attivazione muscolare che può essere captato sulla superficie della pelle.
I robot controllati dall'impedenza di recente sviluppo hanno aperto una nuova era della robotica basata sulla naturale elasticità dei muscoli e delle articolazioni umane, che mancano ai robot rigidi convenzionali. I robot con giunti flessibili dovrebbero essere in grado di funzionare, salta gli ostacoli e fai sport come gli umani. Però, la tecnologia necessaria per insegnare a questi robot a muoversi in questo modo non era disponibile fino a poco tempo fa.
Il team di ricerca KIST è diventato il primo al mondo a sviluppare un modo per insegnare nuovi movimenti ai robot controllati dall'impedenza utilizzando segnali muscolari umani. Con questa tecnologia, che rileva non solo i movimenti umani ma anche le contrazioni muscolari tramite sEMG, ora è diventato possibile per i robot imitare movimenti basati su dimostrazioni umane.
La squadra del Dr. Kee-hoon Kim è riuscita a utilizzare sEMG per insegnare a un robot a intrappolare rapidamente e abilmente una palla che cade rapidamente prima che entri in contatto con una superficie solida o rimbalzi troppo lontano da raggiungere, in modo simile alle abilità impiegate dai giocatori di calcio.
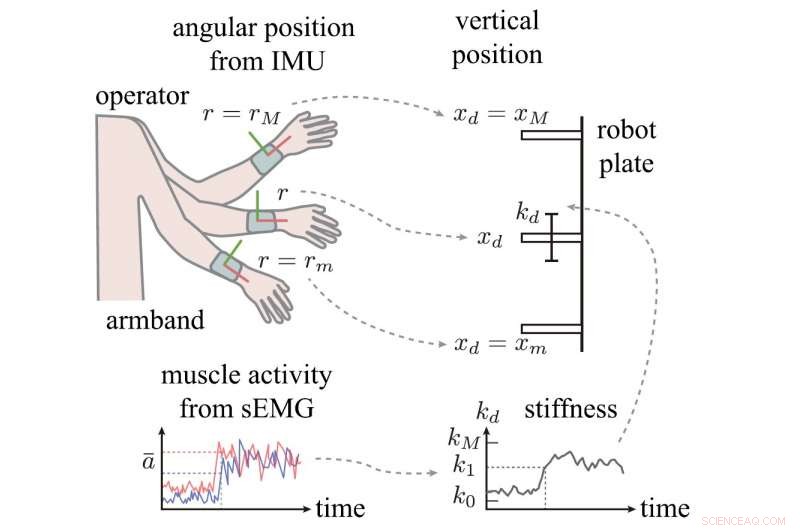
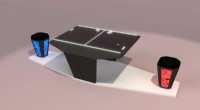
I sensori SEMG erano attaccati al braccio di un uomo, permettendogli di controllare contemporaneamente la posizione e la flessibilità dei rapidi movimenti di salita e discesa del robot. Credito:Korea Institute of Science and Technology (KIST)
I sensori SEMG erano attaccati al braccio di un uomo, permettendogli di controllare contemporaneamente la posizione e la flessibilità dei rapidi movimenti di salita e discesa del robot. L'uomo ha poi "insegnato" al robot come intrappolare una palla che cade rapidamente dando una dimostrazione personale. Dopo aver appreso il movimento, il robot è stato in grado di intrappolare abilmente una palla caduta senza alcuna assistenza esterna.
Questo risultato della ricerca, che mostra che i robot possono essere insegnati intuitivamente a essere flessibili dagli umani, ha attirato molta attenzione, in quanto non è stato realizzato attraverso il calcolo numerico o la programmazione dei movimenti del robot. Questo studio dovrebbe aiutare a far progredire lo studio delle interazioni tra umani e robot, avvicinandoci di un passo a un mondo in cui i robot sono parte integrante della nostra vita quotidiana.
Kim ha detto, "Il risultato di questa ricerca, che si concentra sull'insegnamento delle abilità umane ai robot, è un risultato importante nello studio delle interazioni tra umani e robot".
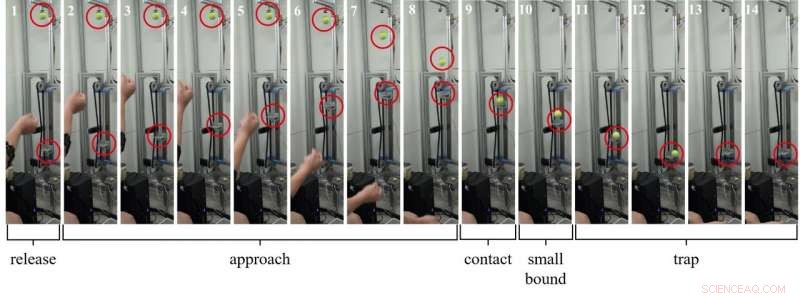
Dimostrazione di un robot per intrappolare la palla senza codifica. Credito:Korea Institute of Science and Technology (KIST)