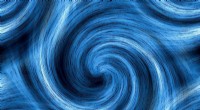
La cupola (area chiara) all'interno del canale acrilico utilizzato per i test sperimentali. All'interno della cupola sono presenti piastre di gallio-indio di metallo liquido (area scura). Credito:Laboratorio di ricerca navale degli Stati Uniti.
La natura può essere una preziosa fonte di ispirazione per i ricercatori che sviluppano robot e sistemi di intelligenza artificiale (AI). Studi in robotica sommergibile, ad esempio, hanno spesso cercato di replicare o incorporare meccanismi osservati nella vita acquatica, come i modelli di locomozione dei pesci e le trame della pelle degli squali.
Un team di ricercatori dell'U.S. Naval Research Laboratory e dell'U.S. Naval Undersea Warfare Center ha recentemente sviluppato una cupola capacitiva di rilevamento del flusso ispirata ai neuromasti superficiali, che sono essenzialmente strutture sul corpo di pesci e anfibi in grado di rilevare il flusso dell'acqua. Questa cupola, presentato in un articolo pubblicato su MDPI, presenta un'elevata sensibilità di 0,05 picofarad per millimetro (pF/mm) e potrebbe essere applicato a una varietà di robot e veicoli progettati per essere dispiegati sott'acqua.
"Il Laboratorio di Ricerca Navale degli Stati Uniti, insieme a molte altre istituzioni, sta esplorando mezzi ispirati alla natura per ottenere una maggiore efficienza e manovrabilità nei robot subacquei, "Charles Rohde, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "In sostanza, la creazione di un pesce artificiale offre molti vantaggi rispetto ai tradizionali design a elica. Se guardiamo alle controparti biologiche, anche se, vediamo che il loro successo non è dovuto solo alla meccanica e al movimento del corpo; i pesci hanno una serie di sensori lungo i loro corpi."
I pesci hanno una serie di cosiddetti sensori della linea laterale che forniscono feedback sulle condizioni del flusso, consentendo loro di orientarsi sott'acqua e rilevare gli oggetti vicini. Rohde e i suoi colleghi volevano replicare questi sensori e imitarne le proprietà per migliorare le prestazioni dei veicoli sottomarini.
Le cupole biologiche osservate nei pesci sono costituite da gel incorporato con peli sensori, che sono attaccati al cervello dell'animale acquatico tramite una serie di nervi. La cupola artificiale sviluppata dai ricercatori, d'altra parte, è costituito da gomma siliconica incorporata con piastre sensibili in metallo liquido, che sono collegati a un microcontrollore tramite fili.
Un'ulteriore differenza tra le cupole naturali e quella artificiale sviluppata dai ricercatori è che mentre la prima impiega segnali elettrochimici, quest'ultimo è capacitivo (cioè come i touchscreen degli smartphone, dipende dalle variazioni dei campi elettrici). A differenza dei touchscreen, il dispositivo bio-ispirato non interagisce con oggetti esterni (es. dita umane). Anziché, è costituito da lastre di metallo liquido che si muovono e si deformano l'una rispetto all'altra.
"Le piastre di metallo liquido (gallio-indio) formano due sensori capacitivi che si deformano in base alle forze impartite alla cupola di silicone dal flusso del fluido, "James Wismann, un altro ricercatore coinvolto nello studio, spiegato. "Mentre la cupola si deforma, le piastre di metallo liquido all'interno si avvicinano o si allontanano l'una dall'altra, cambiando la capacità tra di loro. Un microcontrollore registra questa variazione di capacità, che può essere correlato alla portata del fluido esterno attraverso la sperimentazione e la modellazione matematica."
I sensori capacitivi sviluppati dai ricercatori hanno un'elevata sensibilità e possono anche essere disposti in array. Ad esempio, dozzine di questi sensori potrebbero essere disposti su un robot subacqueo in una linea laterale, al fine di acquisire e monitorare le caratteristiche del flusso d'acqua. Queste cupole di rilevamento sono morbide; quindi possono essere integrati con materiali in pelle artificiale senza aggiungere rigidità alle macchine di ispirazione biologica.

Campione di cupola che mostra la sua flessibilità. Credito:Laboratorio di ricerca navale degli Stati Uniti.
"Ci sono molti altri sensori di flusso basati su cupole e capelli pubblicati in letteratura, ma siamo rimasti sorpresi di trovarne solo un altro sott'acqua, sigillo esempio ispirato ai baffi che era di natura capacitiva, " Rohde ha detto. "I nostri risultati mostrano che il rilevamento capacitivo è un approccio molto promettente, e speriamo che la nostra pubblicazione incoraggi altri a esplorare questo metodo".
Rohde, Wissman e i loro colleghi hanno fabbricato il loro sensore di ispirazione biologica utilizzando tecniche di cera persa e iniezione sotto vuoto. Hanno quindi effettuato una serie di test preliminari per valutarne le prestazioni.
Rispetto ad altri dispositivi capacitivi, il loro sensore incorpora trasduttori nella cupola stessa, piuttosto che alla sua base. Nelle loro valutazioni, questo particolare aspetto della fabbricazione del sensore si è rivelato molto efficace, portando a capacità di rilevamento più avanzate rispetto a quelle osservate nei dispositivi capacitivi precedentemente sviluppati.
"A parte il sensore stesso, un altro aspetto importante è il processo di fabbricazione, " ha detto Wissman. "Per creare una struttura così complessa all'interno di una piccola struttura in silicone, abbiamo usato una combinazione unica di stampaggio sacrificale (si pensi alla fusione a cera persa) e iniezione sotto vuoto di metallo liquido. Questo potrebbe essere facilmente esteso ad altri dispositivi, come complessi cablaggi 3D o antenne."
Il dispositivo di rilevamento sviluppato da Rohde, Wissman e i suoi colleghi potrebbero avere un'ampia varietà di applicazioni nel campo della robotica sommergibile, in quanto consente lo sviluppo di robot in grado di navigare in ambienti sottomarini in modo più efficace. Nel loro lavoro futuro, i ricercatori hanno in programma di miniaturizzare il loro dispositivo, che è attualmente alto 5 mm; 50 volte più grande dei neuromasti osservati nei pesci.
Una versione più piccola del sensore potrebbe consentire una misurazione più diretta delle condizioni di flusso dello strato limite, ancora più vicino alla superficie rivolta verso l'acqua di un robot. Per miniaturizzare il sensore, però, i ricercatori dovranno cambiare i loro metodi di fabbricazione.
Finora, Wissman e i suoi colleghi si sono concentrati principalmente su flussi d'acqua costanti (o che cambiano lentamente), ma variazioni di flusso superveloci (cioè> 1, 000-10, 000 volte al secondo) associati a turbolenze e vortici potrebbero fornire informazioni più approfondite sull'ambiente circostante di un robot. Nei loro prossimi studi, i ricercatori vorrebbero quindi ampliare la portata del loro lavoro includendo queste variazioni di flusso e guardando a tecniche di acquisizione dati più veloci.
"Abbiamo anche in programma di assemblare una serie di cupole artificiali, una linea laterale artificiale, che può essere attaccata a un robot sommergibile, " ha detto Wissman. "Il culmine di questo progetto sarebbe guardare un pesce robotico autonomo, con l'ausilio dei nostri sensori integrati, navigare con successo in una piscina con ostacoli e correnti."
© 2019 Scienza X Rete