Il senso del tatto è generalmente misurato da un sensore che può tradurre una pressione su di esso in un piccolo segnale elettrico. Credito:Shutterstock
Abbiamo robot che possono camminare, vedere, parlare e ascoltare, e manipolare gli oggetti nelle loro mani robotiche. C'è persino un robot che può annusare.
Ma per quanto riguarda il senso del tatto? Questo è più facile a dirsi che a farsi e ci sono limitazioni ad alcuni degli attuali metodi esaminati, ma stiamo sviluppando una nuova tecnica che può superare alcuni di questi problemi.
Per gli umani, il tatto gioca un ruolo fondamentale quando muoviamo il nostro corpo. Tocco, unito alla vista, è fondamentale per compiti come raccogliere oggetti, duri o morbidi, leggero o pesante, caldo o freddo, senza danneggiarli.
Nel campo della manipolazione robotica, in cui una mano robotica o una pinza deve raccogliere un oggetto, l'aggiunta del senso del tatto potrebbe rimuovere le incertezze nell'affrontare oggetti fragili e deformabili.
La ricerca di una pelle intelligente
La quantificazione del tocco in termini ingegneristici non richiede solo la conoscenza precisa della quantità di forza esterna applicata a un sensore tattile, ma devi anche conoscere l'esatta posizione della forza, il suo angolo, e come interagirà con l'oggetto che viene manipolato.
Poi c'è la domanda su quanti di questi sensori avrebbe bisogno di un robot. Lo sviluppo di una skin per robot che potrebbe contenere centinaia o addirittura migliaia di sensori tattili è un compito ingegneristico impegnativo.
Comprendere i meccanismi fisici del rilevamento tattile nel mondo biologico fornisce grandi intuizioni quando si tratta di progettare l'equivalente robotico, una pelle intelligente.
Ma una barriera significativa per lo sviluppo della pelle intelligente è l'elettronica necessaria.
Misurazione quotidiana della forza e del tocco
Il senso del tatto viene generalmente misurato da un sensore in grado di tradurre la pressione in un piccolo segnale elettrico. Quando usi una bilancia digitale per pesarti o misurare gli ingredienti in cucina, le scale probabilmente stanno usando un trasduttore piezoelettrico.
Questo è un dispositivo che trasforma una forza in elettricità. La minuscola corrente elettrica dal trasduttore viene quindi fatta passare attraverso i fili fino a un piccolo microchip che legge la forza della corrente, lo converte in una misurazione del peso significativa, e lo visualizza su uno schermo.
Nonostante sia in grado di percepire diversi livelli di forza, questi dispositivi elettronici hanno diversi limiti che li rendono poco pratici per smart skin. In particolare, hanno un tempo di risposta relativamente lento alla forza.
Esistono altri tipi di sensori tattili basati su un materiale che ne modifica le altre caratteristiche elettriche, come capacità o resistenza. Lo schermo del tuo cellulare potrebbe avere questa tecnologia integrata, e se usi un trackpad sul tuo computer, sicuramente utilizzerà sensori tattili.
Rilevamento della forza morbido e flessibile
Negli ultimi anni sono stati fatti grandi progressi nella realizzazione di sensori tattili che possono essere incorporati in materiali morbidi e flessibili. Questo è esattamente ciò di cui abbiamo bisogno per una pelle intelligente.
Ma molti di questi sviluppi falliscono completamente (a causa del tipo di rilevamento) in presenza di umidità. (Hai mai provato un dito bagnato sul touch screen del tuo smartphone?)
Le applicazioni mediche sono ora uno dei principali fattori alla base della domanda di rilevamento della forza flessibile e robusto. Per esempio, smart skin potrebbe essere utilizzato per ripristinare il feedback sensoriale nei pazienti con danni alla pelle o neuropatia periferica (intorpidimento o formicolio). Potrebbe anche essere usato per conferire alle mani protesiche la capacità di rilevamento del tocco di base.
Recentemente, ricercatori del MIT e di Harvard hanno sviluppato un guanto tattile scalabile e lo hanno combinato con l'intelligenza artificiale. I sensori distribuiti uniformemente sulla mano possono essere utilizzati per identificare singoli oggetti, stimare il loro peso, ed esplorare i tipici pattern tattili che emergono afferrandoli.
I ricercatori hanno creato un guanto con 548 sensori assemblati su un tessuto a maglia contenente un film piezoresistivo (che reagisce anche alla pressione o alla deformazione) collegato da una rete di elettrodi a filo conduttivo.
Questo è il primo tentativo riuscito di registrare tali segnali su larga scala, rivelando importanti intuizioni che possono essere utilizzate nella progettazione futura di protesi e strumenti di presa robotica.
Ma proprio come quasi tutte le altre interfacce touch progettate con capacità capacitiva, tecniche resistive o piezoelettriche, questa tecnologia tattile non funziona bene con le dita bagnate o sott'acqua.
Rilevamento ottico della forza all'orizzonte
Per affrontare questo problema, abbiamo sviluppato una nuova forma di sensore tattile che utilizza pellicole nanometriche di LED organici (OLED) e fotodiodi organici (OPD) per misurare il tocco morbido.
La tecnologia OLED si trova normalmente negli schermi di televisori e smartphone. Il nostro approccio alla misurazione del senso del tatto si basa sul rilevamento ottico della forza.
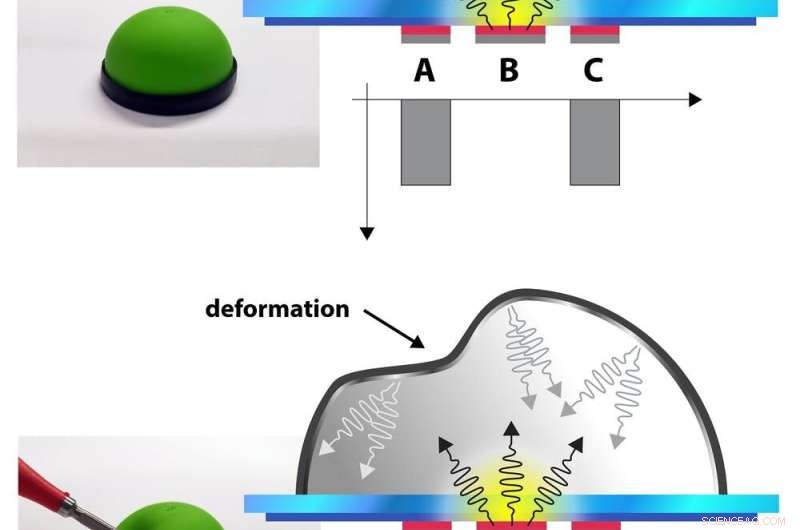
Un unico elemento touch costituito da una cupola su alcuni pixel OLED. Superiore, quando nulla tocca la cupola, una quantità uguale di luce viene riflessa dal pixel che emette luce B, ai pixel di rilevamento della luce A e C. In basso, quando qualcosa tocca la cupola, è deformato e la quantità di luce riflessa cambia tra i pixel A e C. Credito:Ajay Pandey, Autore fornito
Gli elementi OLED (chiamati diodi o pixel) sono in realtà completamente reversibili. Ciò significa che oltre a produrre luce (come in uno schermo televisivo), questi pixel possono anche rilevare la luce.
Usando questo principio possiamo fabbricare un piccolo, opaco, cupola flessibile con rivestimento riflettente che si trova sopra alcuni pixel OLED. La luce emessa dal pixel centrale viene distribuita uniformemente su tutti gli altri pixel sotto la cupola se la cupola non viene disturbata.
Ma se la cupola viene premuta, toccando qualcosa, si deformerà, risultante in una risposta diseguale dai pixel utilizzati per rilevare la luce riflessa. Combinando le risposte di decine di queste cupole nell'area di contatto sarà possibile stimare la forza applicata.
Questo approccio è un passo significativo verso la semplificazione del layout della pelle intelligente per applicazioni di grandi aree e speriamo di vedere presto robot in grado di rilevare il corpo intero nell'aria, quando è bagnato o addirittura sott'acqua.
Questo articolo è stato ripubblicato da The Conversation con una licenza Creative Commons. Leggi l'articolo originale.