Una dimostrazione dell'approssimazione della distanza del sistema. Credito:Bansal et al.
Numerosi paesi nel mondo stanno attualmente affrontando gravi problemi legati alla raccolta dei rifiuti, soprattutto nelle aree urbane, a causa della grande quantità di rifiuti prodotti quotidianamente dalla popolazione. La tecnologia potrebbe svolgere un ruolo significativo nell'affrontare questi problemi, ad esempio, attraverso lo sviluppo di strumenti più efficaci per raccogliere e raccogliere i rifiuti.
Con questo in testa, i ricercatori del Vishwakarma Government Engineering College in India hanno recentemente creato un sistema economico ed efficace per il rilevamento e la raccolta automatici dei rifiuti. Il loro sistema, presentato in un articolo pre-pubblicato su arXiv, utilizza algoritmi di intelligenza artificiale (AI) per rilevare e localizzare i rifiuti nei suoi dintorni, poi lo prende con una pinza robotica.
"I metodi contemporanei hanno difficoltà a gestire il volume di rifiuti solidi generati dalla crescente popolazione urbana, " hanno scritto i ricercatori nel loro articolo. "Proponiamo un sistema molto igienico ed economico che utilizza algoritmi di intelligenza artificiale per rilevare la spazzatura".
Il sistema di gestione dei rifiuti, che i ricercatori chiamano AGDC (rilevamento e raccolta automatici dei rifiuti), è composto da un corpo robotico (cioè una base, un braccio robotico e un cassetto) e diversi algoritmi di apprendimento automatico. Il sistema utilizza reti neurali convoluzionali (CNN) per rilevare i rifiuti sul terreno e nelle sue vicinanze. Una volta che rileva un pezzo di spazzatura, calcola la sua posizione analizzando le immagini raccolte da una telecamera integrata.
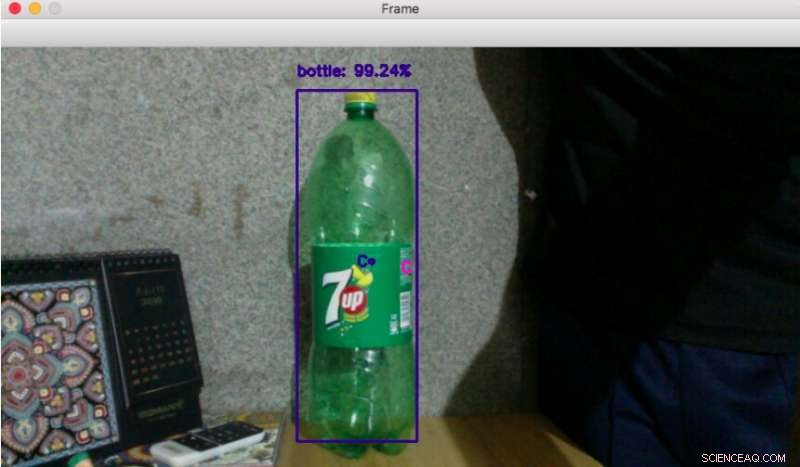
"Il rilevamento di oggetti si riferisce all'identificazione di istanze di oggetti di una particolare classe (come bottiglie, gatto, cane o camion) in immagini e video in formato digitale, " hanno spiegato i ricercatori. "AGDC utilizza il rilevamento degli oggetti per classificare la spazzatura con il resto degli oggetti nell'immagine/video. L'algoritmo di rilevamento degli oggetti consente all'AGDC di identificare i punti nell'immagine o nel video in cui si trova l'oggetto di interesse (cioè i rifiuti)."
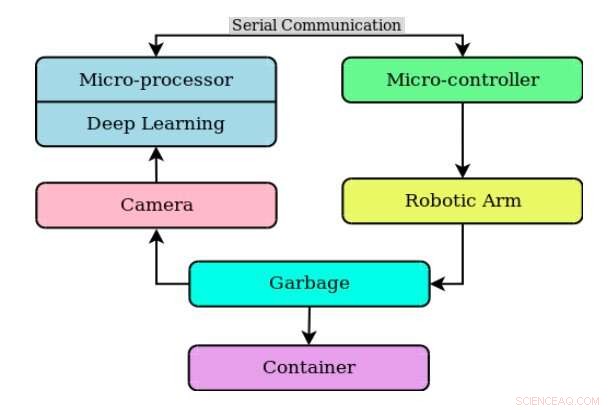
Flusso di comunicazione seriale. Credito:Bansal et al.
Una volta che le CNN del sistema rilevano un pezzo di spazzatura nelle sue vicinanze, un altro algoritmo stima la distanza tra il robot e la spazzatura, generando anche istruzioni affinché il robot raggiunga la posizione di destinazione. La posizione dei detriti e queste istruzioni vengono quindi inviate a un microcontrollore, che controlla essenzialmente i movimenti del robot.
"Dopo aver completato l'attività di rilevamento degli oggetti, il compito successivo è identificare la distanza dell'oggetto dalla base del braccio robotico, che è necessario per consentire al braccio robotico di raccogliere la spazzatura, " hanno spiegato i ricercatori.
Una volta che il microcontrollore riceve informazioni su dove si trova un rifiuto, sposta il robot verso quella posizione. Quando il robot raggiunge finalmente la spazzatura rilevata dalle CNN, usa un braccio robotico per raccoglierlo e lasciarlo cadere in un contenitore (cioè un cassetto) che è attaccato al suo corpo.
"Il design del netturbino può essere suddiviso in tre parti principali:base, braccio robotico e cassetto, " hanno scritto i ricercatori. "La base spinge il robot verso la spazzatura, il braccio robotico raccoglie la spazzatura e il cassetto immagazzina la spazzatura raccolta dal braccio robotico."
I ricercatori hanno già sviluppato un prototipo del loro sistema di rilevamento dei rifiuti, che attualmente può raccogliere fino a 100-200 g di spazzatura. Nel loro lavoro futuro, hanno in programma di espandere questo prototipo, in modo che possa raccogliere da due a tre chilogrammi di spazzatura prima di svuotare il cassetto.
Inoltre, il team sta pensando di sviluppare e addestrare un nuovo modello della CNN che consentirebbe all'AGDC di rilevare più rifiuti contemporaneamente. Infine, connettere il robot a Internet potrebbe anche consentire implementazioni su scala più ampia, ad esempio, creando una rete automatizzata di sistemi che collaborano per raccogliere in modo efficiente i rifiuti in aree specifiche.
© 2019 Scienza X Rete