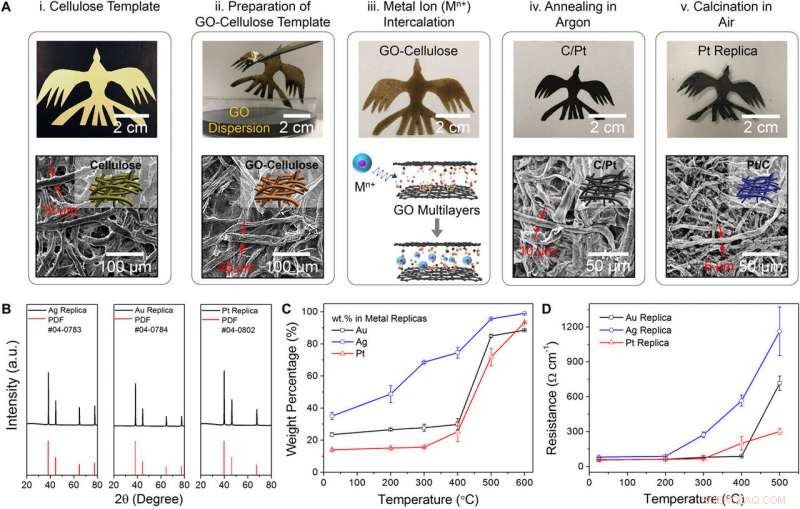
Sintesi di modelli abilitati GO di repliche in metallo nobile.(A) La sintesi di modelli abilitati GO per trasformare la carta di cellulosa in repliche in metallo nobile. Viene dimostrata la sintesi di una replica di Pt a forma di fenice. Le immagini SEM hanno mostrato che le morfologie di rete della carta di cellulosa e del modello di cellulosa GO erano molto simili. Il diametro delle microfibre è diminuito da ~20 a ~6 μm dopo la ricottura/calcinazione in due fasi. (B) Spettri XRD (diffrazione a raggi X) di repliche metalliche sintetizzate dopo ricottura/calcinazione a due stadi. Gli spettri erano coerenti con i loro corrispondenti "file di diffrazione da polvere (PDF)" dal "comitato congiunto sugli standard di diffrazione da polvere". (C) Percentuali in peso di contenuto metallico nelle repliche modellate dopo la calcinazione in aria a diverse temperature. Le percentuali in peso sono determinate mediante analisi EDS (spettroscopia a raggi X a dispersione di energia). (D) Resistenza di repliche metalliche modellate (attraverso 1 cm) dopo la calcinazione in aria a diverse temperature. Le barre di errore indicano le differenze nelle misurazioni da quattro campioni. Credito:progressi scientifici, doi:10.1126/scirobotics.aax7020.
I robot Origami possono essere formati integrando strettamente più funzioni di attuazione, percezione e comunicazione. Ma il compito è impegnativo poiché i materiali convenzionali, tra cui plastica e carta utilizzati per tali progetti robotici, impongono vincoli per limitare le funzionalità aggiuntive. Per installare multifunzionalità nel sistema, gli scienziati devono tipicamente includere componenti elettronici esterni che aumentino il peso del robot. In un recente studio ora pubblicato su Robotica scientifica , Haitao Yang e colleghi dei dipartimenti interdisciplinari di ingegneria chimica e biomolecolare, L'ingegneria biomedica e l'ingegneria elettrica e informatica negli Stati Uniti e a Singapore hanno sviluppato un processo di sintesi di modelli abilitato all'ossido di grafene (GO) per produrre riconfigurabili, dorsali metalliche conformi e multifunzionali. Le dorsali hanno costituito la base per i robot origami abbinati al rilevamento della deformazione integrato e alle capacità di comunicazione wireless. Utilizzando il metodo GO, i ricercatori hanno formato complessi origami di metallo nobile come repliche strutturali di modelli di carta.
Il team di ricerca potrebbe riprodurre strutture origami in platino rese stabili con elastomeri sottili per formare dorsali multifunzionali per creare i nuovi robot origami. I nuovi robot erano più deformabili, ignifughi ed efficienti dal punto di vista energetico rispetto a quelli costruiti con altri materiali. Yang et al. osservate capacità aggiuntive per i nuovi robot platino (robot Pt), compreso il riscaldamento resistivo su richiesta, sensori di deformazione e antenne integrate senza elettronica esterna. Per ulteriori funzionalità, includevano il monitoraggio o la registrazione del movimento robotico in tempo reale, comunicazione wireless tra robot, termoregolazione e controllo magnetico. Il nuovo lavoro ha arricchito la libreria di materiali robotici per progettare robot morbidi versatili.
I ricercatori nel campo della robotica avevano precedentemente esplorato l'antica arte giapponese dell'origami per progettare muscoli artificiali, macchine pieghevoli, sistemi di origami primaverili e metamorfosi robotica. Convenzionalmente, usavano carta di cellulosa, poliestere, polieteretere chetone e politetrafluoroetilene per fabbricare strutture portanti per tali invenzioni. Nonostante il supporto meccanico offerto, le spine dorsali di carta o plastica mancavano di funzionalità di reattività agli stimoli, rilevamento e comunicazione wireless. Invece di installare apparecchiature esterne per fornire tali funzionalità, i team di ricerca ora mirano a sviluppare dorsali robotiche morbide multifunzionali per una stretta integrazione. Gli sforzi di ricerca non hanno ancora dimostrato tali robot morbidi prototipici con dorsali conduttive di origami con potenziale di rilevamento e comunicazione. Di conseguenza, gli scienziati sono desiderosi di sviluppare un nuovo schema di fabbricazione per produrre meccanicamente stabili, dorsali robotiche morbide e conduttive.
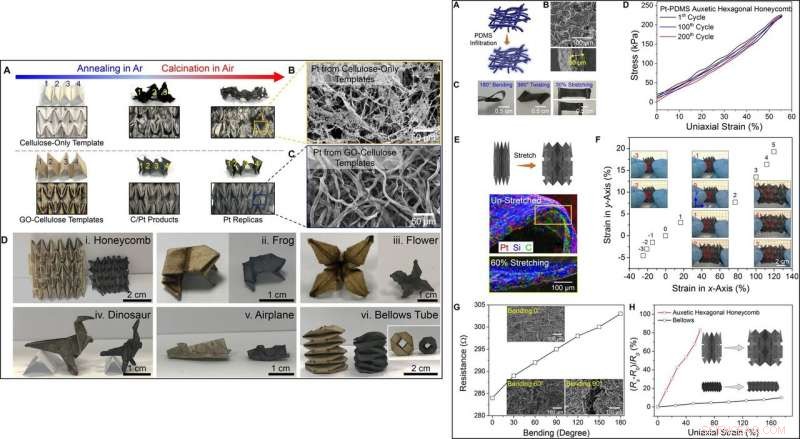
A SINISTRA:Fabbricazione di strutture di origami in metallo. (A) Foto dei prodotti origami metallici esagonali quadrupli e auxetici sintetizzati da modelli di sola cellulosa (riga superiore) e GO-cellulosa (riga inferiore). Sono mostrati i prodotti a base di Pt a diversi stadi di ricottura/calcinazione. Immagini SEM di prodotti Pt sintetizzati da (B) modelli di sola cellulosa e (C) GO-cellulosa. (D) Foto di origami GO-cellulosa e repliche di origami Pt ridimensionate come modello, compreso (i) nido d'ape, (ii) rana, (iii) fiore, (iv) dinosauro, (v) aereo, e (vi) tubo a soffietto. A DESTRA:Trasformare repliche di origami di Pt in metamateriali deformabili di elastomero di Pt. (A) L'infiltrazione di liquido elastomerico diluito in repliche Pt modellate consente la fabbricazione di metamateriali Pt-elastomero. (B) Immagini SEM dall'alto verso il basso e trasversali del composito Pt-elastomero. Lo spessore del composito Pt-elastomero è di circa 90 μm. (C) Grande deformabilità di un film sottile di elastomero di Pt planare (piegatura a 180°, Rotazione a 360°, e il 30% di allungamento). (D) Curve sforzo-deformazione di un origami esagonale auxetico Pt-elastomero durante il test di stabilità per 200 cicli. (E) Immagini SEM in situ con mappatura EDS di una piega dell'elastomero di Pt sotto il 90% di stiramento uniassiale. (F) I modelli di origami esagonali auxetici di elastomero di Pt dipendono dalla deformazione durante la compressione uniassiale (contrassegnata da -1 a -3) e i processi di allungamento (contrassegnati da 1 a 5). La cifra contrassegnata con 0 rappresentava lo stato iniziale. (G) Variazioni di resistenza di un film piatto di elastomero di Pt sotto flessione da 0° a 180°. (H) Cambiamenti di resistenza relativi di origami di Pt-elastomero auxetico esagonale e a soffietto sotto vari ceppi uniassiali. Rs è la resistenza degli origami di Pt-elastomero sotto deformazioni uniassiali; R0 è la resistenza di un origami di elastomero di Pt non teso. Credito:progressi scientifici, doi:10.1126/scirobotics.aax7020.
Durante il processo di fabbricazione, Yang et al. utilizzato multistrati di ossido di grafene (GO) per intercalare una varietà di precursori di ioni metallici, seguita da ricottura ad alta temperatura e calcinazione per produrre le strutture GO ad alta dimensione. Le repliche di ossido di metallo includevano microtexture, filamenti indipendenti e complesse strutture di origami con eccellente controllo chimico e replica strutturale. Il metodo proposto derivato dal GO fornirà una nuova piattaforma per produrre architetture metalliche complesse come dorsali multifunzionali per robot morbidi.
Yang et al. ha convertito le pellicole di carta di cellulosa o le forme di origami in una varietà di repliche metalliche utilizzando il processo di modellazione abilitato per GO. Hanno seguito quattro fasi principali durante il processo di fabbricazione a partire da un modello a forma di fenice per formare sale di metallo nobile (Mn + )-complessi GO-cellulosa intercalati (M-GO-cellulosa). Le repliche metalliche risultanti sono state sottoposte a ulteriori processi di ricottura e calcinazione durante la produzione e il team di ricerca le ha controllate regolando la loro temperatura di calcinazione. Gli scienziati hanno creato complesse strutture metalliche di origami come favi esagonali, rane, fiori, dinosauri, aeroplani e soffietti convertendo varie strutture di origami 3D dalla forma di carta di cellulosa in metallo platino.
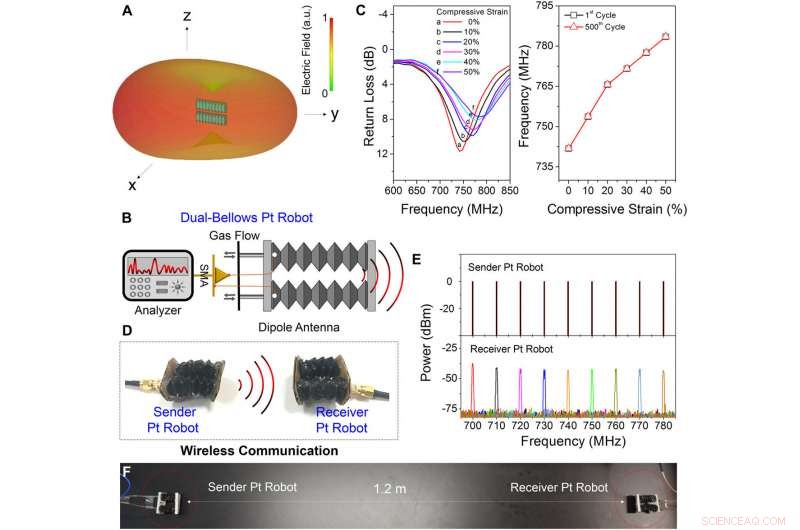
Robot Origami Pt con funzionalità di comunicazione wireless integrate. (A) Schemi di radiazione 3D simulati per due tubi a soffietto in elastomero di Pt a 741,8 MHz sotto sforzo dello 0%. (B) Dimostrazione schematica di un robot Pt a doppio soffietto, che fungeva anche da antenna a dipolo riconfigurabile. (C) Sinistra:perdita di ritorno dell'antenna a dipolo riconfigurabile sotto diversi sforzi di compressione da 0 a 50%. A destra:le frequenze di risonanza sono una funzione delle sollecitazioni di compressione prima e dopo le attuazioni robotiche di 500 cicli. (D) Fotografia di un robot Pt mittente (invio di segnali) (a sinistra) e di un robot Pt ricevitore (segnali di ricezione) (a destra). (E) I segnali di impulso (il robot Pt mittente inviato) sono stati ben ricevuti dal robot Pt ricevitore. La frequenza dei segnali inviati era identica ai segnali ricevuti. (F) Due robot Pt sono stati in grado di comunicare in remoto a una distanza di 1,2 m. Credito:progressi scientifici, doi:10.1126/scirobotics.aax7020.
Per migliorare la stabilità meccanica, includevano elastomeri sottili alle strutture metalliche di origami per una grande deformabilità e riconfigurazione reversibile. Yang et al. ha scelto il platino per la sua efficiente conservazione strutturale, elevata flessibilità meccanica ed elevata conducibilità elettrica rispetto all'oro (Au) o all'argento (Ag). Il team ha ottimizzato la dorsale in elastomero di Pt per un'elevata conduttività elettrica e flessibilità meccanica, per il risultante composito planare Pt-elastomero per sostenere deformazioni ampie e ripetute, ideale per dorsali robotiche morbide. Le dorsali metalliche riconfigurabili hanno introdotto funzionalità multiple e distinte per formare robot origami metamateriali, incluso il potenziale intrinseco di resistenza al fuoco. Il team di ricerca ha testato questa funzione consentendo ai robot Pt di sostenere il contatto diretto con una fiamma per un'esposizione prolungata (800 0 C per 30 secondi), in confronto un robot di carta si è acceso in pochi secondi (meno di 5 secondi).
La struttura portante dell'elastomero di Pt era più sottile e leggera dei robot di carta in cellulosa, ma è rimasta meccanicamente stabile durante l'attuazione robotica reversibile. Il robot basato su carta richiedeva grandi variazioni di pressione per allungarsi o contrarsi; mentre il robot Pt richiedeva solo variazioni di pressione inferiori. Yang et al. ha quindi sviluppato il robot origami conduttivo Pt per inviare e ricevere onde elettromagnetiche (EM) e fungere da antenna riconfigurabile per la comunicazione wireless. Prima della produzione, il team di ricerca ha simulato schemi di radiazione 3D per esplorare l'uso di robot Pt come antenne radianti e li ha fabbricati successivamente. Gli scienziati hanno anche mostrato la comunicazione wireless tra due robot Pt che fungevano da mittente e ricevitore. Quando un robot mittente invia segnali a impulsi a frequenze diverse, il robot ricevitore di stanza a 1,2 m di distanza li ha ricevuti senza deviazioni di frequenza tra i segnali inviati e ricevuti.
Confronto della pressione del gas tra robot carta e Pt. Credito:progressi scientifici, doi:10.1126/scirobotics.aax7020.
Il team ha confrontato cinque categorie di caratteristiche robotiche nel lavoro per dimostrare i vantaggi tecnici dell'utilizzo delle dorsali metalliche Pt abilitate GO rispetto alla (1) densità della dorsale, (2) rigidità meccanica, (3) efficienza energetica, (4) capacità di rilevamento della deformazione e (5) capacità di comunicazione wireless. Il team di ricerca ha ulteriormente ottimizzato i due robot Pt per la comunicazione wireless, in cui un robot mittente ha fornito istruzioni di navigazione in modalità wireless a un robot ricevitore per aggirare con successo un ostacolo ingegnerizzato seguendo un percorso guidato.
Il team ha quindi ampliato le applicazioni del sistema utilizzando la produzione 3D additiva, dove hanno combinato l'inchiostro Pt-Go-cellulosa con la modellazione a deposizione fusa (FDM) per stampare in 3D forme modellate di dorsali robotiche metalliche. Successivamente, hanno progettato robot Pt per il controllo remoto con campi magnetici. Per questo, Yang et al. sintetizzato una replica in Pt con inchiostro Pt-Go-cellulosa e infiltrato la soluzione polimerica con particelle magnetiche per creare una struttura magnetica in Pt. Le nuove strutture contenevano le consuete capacità integrate di rilevamento della deformazione e comunicazione wireless, con movimento magnetico aggiunto. I robot magnetici Pt potrebbero subire una trasformazione della forma e del corpo reversibile sotto attuazione magnetica per avanzare in allineamento con i campi magnetici rotanti.
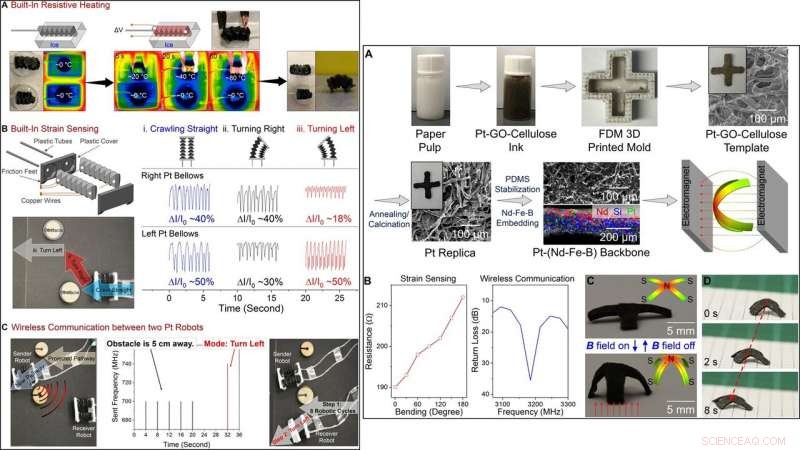
A SINISTRA:Dimostrazioni di robot Pt multifunzionali. (A) Robot Pt a soffietto singolo con capacità di riscaldamento resistivo incorporata. Due robot Pt sono stati congelati in cubetti di ghiaccio. Con una tensione applicata di 20 V, il robot Pt superiore è stato rapidamente riscaldato a ca. 80°C in 60 s, fuggito dal ghiaccio, e continuò a strisciare in avanti. (B) Robot Pt a doppio soffietto con capacità di rilevamento della deformazione incorporata. Le dorsali robotiche Pt erano collegate con fili di rame, e la connessione è stata riparata usando la pasta d'argento. Il percorso proposto per il robot Pt a doppio soffietto prevedeva (i) lo scorrimento diritto, (ii) svoltando a destra, e (iii) svoltare a sinistra. Le attuazioni robotiche lungo l'intero percorso sono state monitorate leggendo i profili correnti dei tubi a soffietto Pt sinistro e destro. (C) Comunicazione wireless tra due robot Pt a doppio soffietto. Il robot mittente è stato bloccato da un ostacolo sul percorso proiettato e ha girato a sinistra per aggirare l'ostacolo. Il robot mittente ha inviato una serie di segnali al robot ricevitore. I segnali sono stati quindi interpretati nella linea guida mobile per il robot ricevitore, consentendo al robot di seguire il percorso proposto senza incontrare l'ostacolo. A DESTRA:Fabbricazione di robot Pt ad azionamento magnetico tramite inchiostro Pt-GO-cellulosa. (A) La fabbricazione alternativa di robot Pt è stata dimostrata sviluppando inchiostro Pt-GO-cellulosa e incorporandolo con la stampa 3D FDM. Dopo la ricottura/calcinazione in due fasi, stabilizzazione PDMS, e inclusione con particelle di Nd-Fe-B, è stato fabbricato un robot tetrapodi Pt–(Nd–Fe–B) azionato magneticamente. (B) Rilevamento della deformazione integrato e capacità di comunicazione wireless del robot tetrapodi Pt–(Nd–Fe–B). (C) Il robot tetrapode Pt–(Nd–Fe–B) si è inarcato su e giù sotto l'attivazione magnetica. (D) Il robot tetrapode Pt–(Nd–Fe–B) si è mosso in avanti seguendo le traiettorie dei campi magnetici rotanti. Credito:progressi scientifici, doi:10.1126/scirobotics.aax7020.
In questo modo, Haitao Yang e colleghi hanno sviluppato un protocollo di sintesi dei modelli abilitato per Go per produrre riconfigurabili, dorsali metalliche conformi e multifunzionali per costruire robot origami metallici. I robot contenevano funzionalità integrate di rilevamento della deformazione e comunicazione wireless. Le spine dorsali metalliche sintetiche realizzate con metalli nobili complessi tra cui argento, oro e platino erano repliche strutturali elevate delle loro controparti di carta. Rispetto alle tradizionali carte e plastiche, le dorsali riconfigurabili in elastomero di Pt offrivano leggerezza, deformabilità ed efficienza energetica. Yang et al. immaginare applicazioni pratiche per robot di origami metallici che vanno da attività in ambienti ad alto rischio, per l'uso in muscoli artificiali e braccia robotiche, e come robot untethered telecomandati. Mirano a ottimizzare le dorsali metalliche con materiali elettrochimicamente attivi per formare successivamente dispositivi di accumulo di energia. Tali sviluppi arricchiranno la libreria di materiali robotici per fabbricare diversi robot morbidi con un'integrazione altamente funzionale.
© 2019 Science X Network