Il carrello era dotato di occhi robotici che potevano essere spostati in qualsiasi direzione, controllati da uno del team di ricerca. Il parabrezza era coperto per dare l'impressione che non ci fosse nessun guidatore all'interno. Credito:Chang et al. 2022
Gli occhi robotici sui veicoli autonomi potrebbero migliorare la sicurezza dei pedoni, secondo un nuovo studio dell'Università di Tokyo. I partecipanti hanno interpretato scenari in realtà virtuale (VR) e hanno dovuto decidere se attraversare una strada davanti a un veicolo in movimento o meno. Quando quel veicolo è stato dotato di occhi robotici, che guardavano il pedone (registrando la loro presenza) o allontanandolo (non registrandolo), i partecipanti potevano fare scelte più sicure o più efficienti.
I veicoli a guida autonoma sembrano essere dietro l'angolo. Che stiano consegnando pacchi, arando campi o portando i bambini a scuola in autobus, sono in corso molte ricerche per trasformare in realtà un'idea un tempo futuristica.
Mentre la preoccupazione principale per molti è il lato pratico della creazione di veicoli in grado di navigare autonomamente nel mondo, i ricercatori dell'Università di Tokyo hanno rivolto la loro attenzione a una preoccupazione più "umana" della tecnologia di guida autonoma. "Non ci sono sufficienti indagini sull'interazione tra le auto a guida autonoma e le persone che le circondano, come i pedoni. Quindi, abbiamo bisogno di ulteriori indagini e sforzi in tale interazione per portare sicurezza e sicurezza alla società per quanto riguarda le auto a guida autonoma", ha affermato Professor Takeo Igarashi della Graduate School of Information Science and Technology.
Una differenza fondamentale rispetto ai veicoli a guida autonoma è che i conducenti possono diventare più passeggeri, quindi potrebbero non prestare la massima attenzione alla strada o potrebbe non esserci nessuno al volante. Ciò rende difficile per i pedoni valutare se un veicolo ha registrato la propria presenza o meno, poiché potrebbe non esserci alcun contatto visivo o indicazioni da parte delle persone al suo interno.
Quindi, come potrebbero essere informati i pedoni quando un veicolo autonomo li ha notati e ha intenzione di fermarsi? Come un personaggio del film Pixar Cars, un carrello da golf a guida autonoma era dotato di due grandi occhi robotici telecomandati. I ricercatori l'hanno chiamata "l'auto che guarda". Volevano verificare se mettere gli occhi in movimento sul carrello avrebbe influito sul comportamento più rischioso delle persone, in questo caso, se le persone avrebbero comunque attraversato la strada davanti a un veicolo in movimento quando hanno fretta.
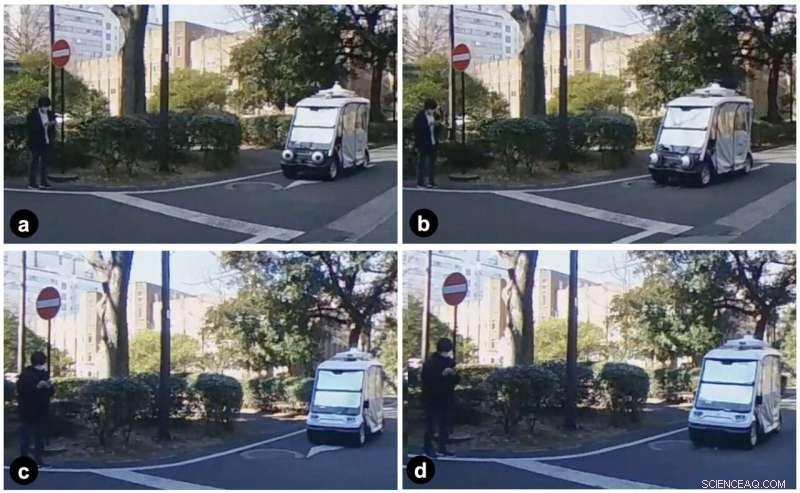
Nell'esperimento, i partecipanti dovevano decidere se il carrello li avesse notati o meno e si sarebbe fermato. Le immagini mostrano la visuale in prima persona di un partecipante. In (a) il carrello sta prestando attenzione al partecipante (sicuro da attraversare); in (b) il carrello non presta attenzione al partecipante (non è sicuro attraversare); e in (c) e (d) il partecipante non lo sa. Credito:Chang et al. 2022
Il team ha impostato quattro scenari, due in cui il carrello aveva gli occhi e due senza. Il carrello aveva notato il pedone e intendeva fermarsi oppure non lo aveva notato e avrebbe continuato a guidare. Quando il carrello aveva gli occhi, gli occhi guardavano verso il pedone (si ferma) o guardavano altrove (non si fermavano).
Poiché sarebbe ovviamente pericoloso chiedere ai volontari di scegliere se camminare o meno davanti a un veicolo in movimento nella vita reale (anche se per questo esperimento c'era un autista nascosto), il team ha registrato gli scenari utilizzando videocamere a 360 gradi e il 18 partecipanti (nove donne e nove uomini, di età compresa tra 18 e 49 anni, tutti giapponesi) hanno svolto l'esperimento in VR. Hanno sperimentato gli scenari più volte in ordine casuale e ogni volta hanno avuto tre secondi per decidere se avrebbero attraversato o meno la strada davanti al carrello. I ricercatori hanno registrato le loro scelte e misurato i tassi di errore delle loro decisioni, ovvero quante volte hanno scelto di fermarsi quando avrebbero potuto incrociare e quante volte hanno incrociato quando avrebbero dovuto aspettare.
"I risultati hanno suggerito una chiara differenza tra i sessi, che è stata molto sorprendente e inaspettata", ha affermato Chia-Ming Chang, docente del progetto, membro del team di ricerca. "Sebbene altri fattori come l'età e il background potrebbero aver influenzato le reazioni dei partecipanti, riteniamo che questo sia un punto importante, poiché mostra che diversi utenti della strada possono avere comportamenti ed esigenze diverse, che richiedono modalità di comunicazione diverse nella nostra futura guida autonoma mondo.
"In questo studio, i partecipanti maschi hanno preso molte decisioni pericolose sugli attraversamenti stradali (ad esempio, scegliendo di attraversare quando l'auto non si fermava), ma questi errori sono stati ridotti dallo sguardo del carrello. Tuttavia, non c'era molta differenza nelle situazioni di sicurezza per loro (cioè, scegliendo di attraversare quando l'auto si sarebbe fermata)", ha spiegato Chang.
"D'altra parte, le partecipanti di sesso femminile hanno preso decisioni più inefficienti (cioè, scegliendo di non attraversare quando l'auto intendeva fermarsi) e questi errori sono stati ridotti dallo sguardo del carrello. Tuttavia, non c'era molta differenza nelle situazioni pericolose per loro." In definitiva, l'esperimento ha dimostrato che gli occhi hanno prodotto un incrocio più agevole o più sicuro per tutti.
Ma come facevano gli occhi a far sentire i partecipanti? Alcuni pensavano che fossero carini, mentre altri li vedevano inquietanti o spaventosi. Per molti partecipanti maschi, quando gli occhi stavano distogliendo lo sguardo, hanno riferito di aver sentito che la situazione era più pericolosa. Per le partecipanti di sesso femminile, quando gli occhi le guardavano, molte dicevano di sentirsi più al sicuro.
"Ci siamo concentrati sul movimento degli occhi, ma non abbiamo prestato troppa attenzione al loro design visivo in questo particolare studio. Abbiamo appena costruito quello più semplice per ridurre al minimo i costi di progettazione e costruzione a causa dei vincoli di budget", ha spiegato Igarashi. "In futuro, sarebbe meglio che un designer di prodotti professionista trovasse il miglior design, ma probabilmente sarebbe comunque difficile soddisfare tutti. Personalmente mi piace. È piuttosto carino."
Il team riconosce che questo studio è limitato dal piccolo numero di partecipanti che eseguono un solo scenario. È anche possibile che le persone facciano scelte diverse in VR rispetto alla vita reale. Tuttavia, "il passaggio dalla guida manuale alla guida automatica è un enorme cambiamento. Se gli occhi possono effettivamente contribuire alla sicurezza e ridurre gli incidenti stradali, dovremmo seriamente considerare di aggiungerli. In futuro, vorremmo sviluppare il controllo automatico degli occhi robotici collegati all'IA a guida autonoma (invece di essere controllata manualmente), che potrebbe adattarsi a diverse situazioni", ha affermato Igarashi. "Spero che questa ricerca incoraggi altri gruppi a provare idee simili, qualsiasi cosa che faciliti una migliore interazione tra auto a guida autonoma e pedoni, che alla fine salva la vita delle persone."
Lo studio è stato pubblicato nell'ambito degli Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications . + Esplora ulteriormente