Un esempio di conversazione tra i ricercatori ed Erica. Credito:Inoue et al.
Almeno dal tempo delle menti indagatrici come Platone, filosofi e scienziati si sono interrogati sulla domanda "Cosa c'è di così divertente?" I greci attribuivano la fonte dell'umorismo al sentirsi superiori a spese degli altri. Lo psicoanalista tedesco Sigmund Freud credeva che l'umorismo fosse un modo per liberare l'energia repressa. Il comico statunitense Robin Williams ha sfruttato la sua rabbia per l'assurdo per far ridere la gente.
Sembra che nessuno possa davvero essere d'accordo sulla domanda "Cosa c'è di così divertente?" Quindi immagina di provare a insegnare a un robot a ridere. Ma questo è esattamente ciò che un team di ricercatori dell'Università di Kyoto in Giappone sta cercando di fare progettando un'IA che prende spunto da un sistema di risate condiviso. Gli scienziati descrivono il loro approccio innovativo alla costruzione di un osso divertente per l'androide giapponese "Erica" nell'ultimo numero della rivista Frontiers in Robotics and AI .
Non è che i robot non siano in grado di rilevare le risate o addirittura di emettere una risatina a una battuta di papà cattivo. Piuttosto, la sfida è creare le sfumature umane dell'umorismo per un sistema di intelligenza artificiale per migliorare le conversazioni naturali tra robot e persone.
"Pensiamo che una delle funzioni importanti dell'IA conversazionale sia l'empatia", ha spiegato l'autore principale Dr. Koji Inoue, assistente professore all'Università di Kyoto nel Dipartimento di Scienza e Tecnologia dell'Intelligenza all'interno della Graduate School of Informatics. "La conversazione è, ovviamente, multimodale, non si limita a rispondere correttamente. Quindi abbiamo deciso che un modo in cui un robot può entrare in empatia con gli utenti è condividere le loro risate, cosa che non puoi fare con un chatbot basato su testo."
È successa una cosa divertente
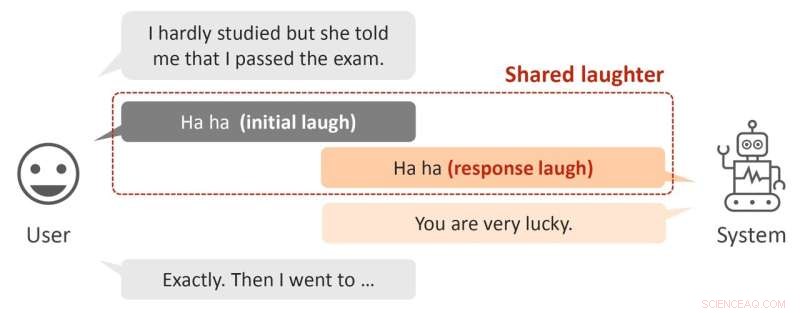
Nel modello della risata condivisa, un essere umano inizialmente ride e il sistema di intelligenza artificiale risponde con una risata come risposta empatica. Questo approccio ha richiesto la progettazione di tre sottosistemi:uno per rilevare la risata, un secondo per decidere se ridere e un terzo per scegliere il tipo di risata appropriato.
Gli scienziati hanno raccolto dati sull'allenamento annotando più di 80 dialoghi di speed dating, uno scenario sociale in cui grandi gruppi di persone si mescolano o interagiscono tra loro uno contro uno per un breve periodo di tempo. In questo caso, la maratona di matchmaking ha coinvolto studenti dell'Università di Kyoto e di Erica, teleoperati da diverse attrici amatoriali.
"La nostra più grande sfida in questo lavoro è stata identificare i casi reali di risate condivise, il che non è facile, perché come sai, la maggior parte delle risate in realtà non è affatto condivisa", ha detto Inoue. "Dovevamo categorizzare accuratamente quali risate potevamo usare per la nostra analisi e non solo presumere che si potesse rispondere a qualsiasi risata."
Anche il tipo di risata è importante, perché in alcuni casi una risatina educata può essere più appropriata di una forte risata. L'esperimento si limitava a risate sociali e allegre.
Il robot lo capisce
Il team alla fine ha testato il nuovo senso dell'umorismo di Erica creando quattro brevi dialoghi da due a tre minuti tra una persona ed Erica con il suo nuovo sistema di risate condivise. Nel primo scenario, ha pronunciato solo risate sociali, seguite solo da risate allegre nel secondo e nel terzo scambio, con entrambi i tipi di risate combinati nell'ultimo dialogo. Il team ha anche creato altre due serie di dialoghi simili come modelli di base. Nella prima Erica non ride mai. Nel secondo, Erica emette una risata sociale ogni volta che rileva una risata umana senza utilizzare gli altri due sottosistemi per filtrare il contesto e la risposta.
I ricercatori hanno raccolto in crowdsourcing più di 130 persone in totale per ascoltare ogni scenario all'interno delle tre diverse condizioni - sistema di risate condivise, niente risate, tutte risate - e hanno valutato le interazioni basate su empatia, naturalezza, somiglianza umana e comprensione. Il sistema delle risate condivise ha funzionato meglio di entrambe le linee di base.
"Il risultato più significativo di questo documento è che abbiamo mostrato come possiamo combinare tutti e tre questi compiti in un unico robot. Riteniamo che questo tipo di sistema combinato sia necessario per un comportamento corretto di ridere, non semplicemente per rilevare una risata e rispondere a ", ha detto Inoue.
Come vecchi amici
Ci sono ancora molti altri stili di risate su cui modellare e addestrare Erica prima che sia pronta per colpire il circuito in piedi. "Ci sono molte altre funzioni e tipi di risate che devono essere presi in considerazione, e questo non è un compito facile. Non abbiamo nemmeno tentato di modellare le risate non condivise, anche se sono le più comuni", ha osservato Inoue.
Naturalmente, la risata è solo un aspetto di una conversazione naturale simile a quella umana con un robot.
"I robot dovrebbero effettivamente avere un carattere distinto e pensiamo che possano dimostrarlo attraverso i loro comportamenti di conversazione, come ridere, sguardo, gesti e stile di parlare", ha aggiunto Inoue. "Non pensiamo che questo sia affatto un problema facile e potrebbero volerci più di 10 o 20 anni prima di poter finalmente chattare casualmente con un robot come faremmo con un amico". + Esplora ulteriormente