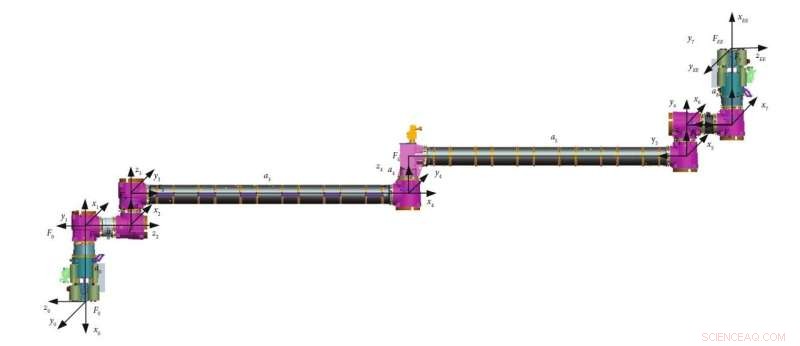
Nella ricerca, i risultati della simulazione del nostro algoritmo di controllo adattivo composito ricorsivo sono presentati rispetto all'algoritmo di controllo adattivo diretto. I frame delle coordinate del manipolatore della Stazione Spaziale Cinese sono tracciati qui. Credito:Spazio:scienza e tecnologia
Nel processo di costruzione e manutenzione ordinaria della Stazione Spaziale Cinese, il manipolatore svolge un ruolo significativamente importante in grado di svolgere alcuni compiti chiave, come l'attracco di trasposizione, la manutenzione quotidiana e le attività extraveicolari ausiliarie. L'elevata precisione e le prestazioni dinamiche del manipolatore sono necessarie per il corretto completamento di questi compiti, che spesso possono essere mantenuti da controlli progettati sulla base del modello dinamico.
Tuttavia, nelle situazioni pratiche, di solito non è realistico ottenere tutti i parametri di inerzia con precisione. Pertanto, il controllo adattivo è sviluppato per garantire la convergenza del controllo di tracciamento anche se il sistema ha parametri incerti o che cambiano lentamente. In un documento di ricerca recentemente pubblicato su Spazio:scienza e tecnologia , il dott. Li del Laboratorio statale chiave di gestione e controllo per sistemi complessi, ha proposto una nuova implementazione ricorsiva del controllo adattivo composito per manipolatori di robot.
In primo luogo, il Dr. Li ha rivisitato il controller adattivo composito proposto da Slotine e Li. Il controllo adattivo può garantire la convergenza del controllo di tracciamento anche se il sistema ha parametri incerti o che cambiano lentamente. In generale, questo schema può essere suddiviso in due classi denominate adattamento diretto e adattamento indiretto in base al segnale che guida la legge di aggiornamento dei parametri.
Nella prima categoria, l'aggiornamento dei parametri è guidato dagli errori di tracciamento, mentre nella seconda categoria i parametri vengono modificati in base agli errori di predizione, solitamente delle coppie filtrate del giunto. Il controllo adattivo basato sugli errori di tracciamento di solito può garantire una convergenza di tracciamento globale; tuttavia, la convergenza dei parametri stimati ha condizioni più stringenti. In confronto, il controllo adattivo indiretto ha una maggiore velocità di convergenza dei parametri, ma è generalmente difficile ottenere la stabilità degli errori di tracciamento.
Combinando i due metodi, il noto controller adattivo composito presenta i vantaggi di entrambi, in cui l'adattamento dei parametri è guidato sia da errori di tracciamento che da errori di previsione. Tuttavia, la complessità computazionale di questi metodi di controllo adattivo è una limitazione principale nei pratici manipolatori di robot, in particolare nel caso con un alto grado di libertà. Finora, solo pochi lavori hanno prestato attenzione all'esecuzione ricorsiva del controllore adattivo indiretto o adattivo composito, probabilmente perché l'uso dell'errore di predizione espresso dalla matrice di regressione rende molto difficile ridurre l'ordine della complessità computazionale.
Per risolvere le suddette difficoltà, il Dr. Li ha riscritto la formulazione di Newton-Eulero utilizzando la forma di matrici generali dal classico Algoritmo di Newton-Eulero ricorsivo. Quindi, viene progettato il metodo di controllo adattivo composito ricorsivo e la stabilità del metodo proposto viene verificata selezionando una funzione di Lyapunov appropriata. La complessità computazionale dell'adattamento composito ricorsivo proposto è molto inferiore a quella degli studi esistenti. Il motivo è che nel controller composito originale, nessuna considerazione è stata dedicata ai suoi aspetti computazionali. Poiché il carico computazionale dei controller proposti è della stessa scala dei controller adattivi diretti ricorsivi, viene condotto un confronto tra questi due metodi.
I risultati mostrano che gli errori di tracciamento sono ovviamente ridotti utilizzando il controller adattivo composito ricorsivo e le stime dei parametri convergono più velocemente con il controller adattivo composito ricorsivo. Nella parte di simulazione, il manipolatore della Stazione Spaziale Cinese viene utilizzato come esempio di simulazione, ei risultati verificano l'efficacia dell'algoritmo ricorsivo proposto. Inoltre, poiché il carico computazionale è lineare con il numero dei giunti, il metodo proposto è interessante soprattutto per il manipolatore multigiunto ridondante.