Comportamenti tipici delle goccioline manipolate utilizzando il robot ad azionamento magnetico. Credito:progressi scientifici, doi:10.1126/sciadv.aay5808
La manipolazione delle goccioline nella scienza dei materiali può contribuire alla raccolta dell'acqua, diagnostica medica e tecniche di somministrazione dei farmaci. Mentre le operazioni liquide basate sulla struttura sono ampiamente utilizzate in natura e nei materiali artificiali bioispirati, le strategie di laboratorio dipendono da strutture fisse per il movimento unidirezionale dell'acqua. In un nuovo studio su Progressi scientifici , An Li e un gruppo di ricerca dell'Istituto di chimica e dell'Università dell'Accademia cinese delle scienze in Cina hanno proposto di sviluppare un robot ad azionamento magnetico. Il costrutto aveva strutture regolabili per distribuire le forze di resistenza e determinare il comportamento delle goccioline. Il robot potrebbe trasportare, diviso, rilascia e ruota le gocce per applicazioni universali in vari campi e ambienti difficili. Le nuove scoperte offrono una strategia efficiente per la manipolazione automatizzata delle goccioline.
In questo lavoro, Li et al. ha utilizzato metodi affidabili per manipolare le goccioline utilizzando un robot ad azionamento magnetico con sfere di acciaio in un campo magnetico programmabile. Gli scienziati hanno controllato la struttura del robot regolando il campo magnetico. Le strutture differenziate del robot hanno portato a diverse combinazioni comportamentali delle goccioline, tra cui split, pubblicazione, rotazione e trasporto. Il robot è universalmente applicabile a vari fluidi tra cui acqua, olio e gas. Li et al. azionamento assistito del robot in spazi limitati, su superfici irregolari e anche in condizioni anidre o anaerobiche. Il lavoro ha un grande potenziale per il trasporto di materiale, microfabbricazione e in medicina clinica.
La manipolazione delle gocce in laboratorio si ispira alla natura. Per esempio, piante e animali hanno mostrato sistemi di raccolta della nebbia nei cactus, raccolta dell'acqua su seta di ragno e ha influenzato il comportamento dello scarabeo del deserto del Namib per raccogliere e spostare l'acqua. La struttura asimmetrica e intrinseca per la raccolta del campione d'acqua può indurre un gradiente di pressione di Laplace nelle goccioline, provocando il movimento in una direzione prestabilita. I ricercatori possono utilizzare varie strategie esterne tra cui l'elettricità, magneti, acustica e superfici bagnanti per attuarne il movimento. Di questi, la forza magnetica ha il vantaggio di un'azione a lungo raggio, sicurezza e facilità di controllo. I ricercatori hanno utilizzato particelle magnetiche per trascinare le gocce d'acqua su superfici idrofobe o modellate e su materiali magneticamente reattivi.
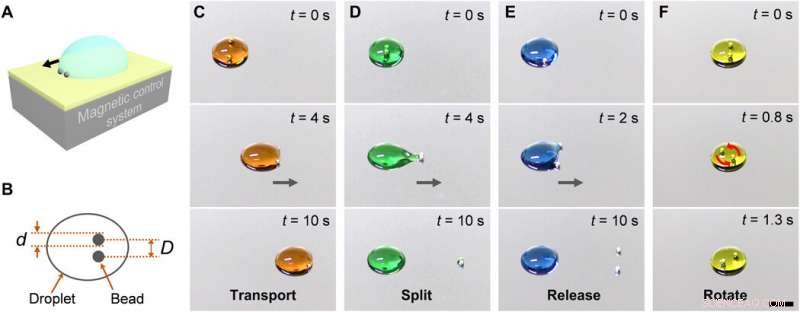
Schema e dimostrazione del robot ad azionamento magnetico. (A) Schema del sistema di manipolazione delle gocce. (B) Parametri che descrivono il robot ad azionamento magnetico. (da C a F) Comportamenti tipici delle goccioline manipolate dal robot. Le goccioline possono essere trasportate (C), diviso (D), rilasciato (E), e ruotato (F) dal robot. Le frecce grigie rappresentano la direzione di movimento dei robot. La velocità di spostamento è di 2 mm/s. Il volume delle goccioline è di 250 μl. Barra della scala, 5mm. Credito:progressi scientifici, doi:10.1126/sciadv.aay5808
Li et al. chiamò le due sfere di acciaio nel sistema di controllo magnetico "robot" e colorò le gocce d'acqua con additivi alimentari per identificare distintamente le diverse modalità di attuazione. Il robot idrofilo (amante dell'acqua) ha catturato facilmente la goccia al contatto. Il team di ricerca ha trasferito la gocciolina e ne ha regolato la struttura per dividere una goccia figlia o rilasciare la gocciolina riducendo o aumentando la distanza tra le perline. Il processo si è basato principalmente sulla struttura robotica in cui il suo volume (V) ha influenzato il risultato. Li et al. quantificato la struttura del robot utilizzando la distanza da centro a centro delle perline rispetto al diametro (D/d). Per esempio, un robot con un rapporto D/d di 1,67 potrebbe trasportare una goccia d'acqua da 150 µl. Però, se la gocciolina si è ingrandita a 350 µl, si dividerebbe. Per capire questo, hanno analizzato meccanicamente l'intero sistema e quindi hanno determinato che la forza trainante dietro il dispositivo era l'adesione tra il tallone e la gocciolina.

Visualizzazione delle reazioni di neutralizzazione a base acida graduale. Credito:progressi scientifici, doi:10.1126/sciadv.aay5808
Dopo aver controllato la goccia d'acqua nell'aria, il team ha studiato il robot in diverse condizioni, comprese diverse atmosfere. Per esempio, trascinavano una goccia per spostarla verso l'alto o verso il basso vincendo le forze di gravità e le forze di adesione tra le diverse gocce e il substrato. Tali dispositivi hanno applicazioni in spazi limitati come scatole e tubi vitali nella microfluidica e nella medicina clinica. Il trasporto senza perdite e il controllo preciso dei reagenti sono vitali per le microreazioni chimiche quantitative ampiamente utilizzate nella chimica analitica, diagnostica e biotecnologia. Per esempio, Li et al. condotto reazioni sequenziali di neutralizzazione acido-base tramite la manipolazione programmabile delle gocce del robot, per dividere una gocciolina figlia e trasferirla per formare una gocciolina neutra. I robot hanno fornito un percorso versatile per controllare automaticamente le goccioline per le microreazioni utilizzando aliquote precise di reagente che sono tipicamente tossiche, natura radioattiva o esplosiva.
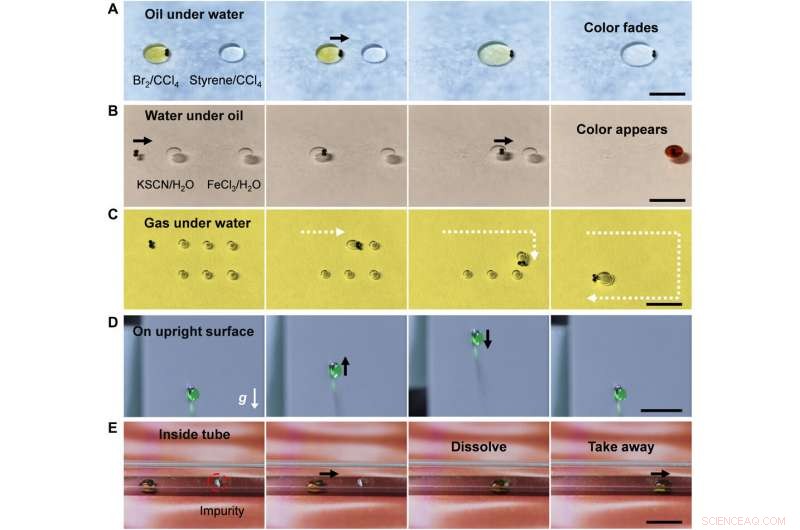
Dimostrazione di generalità del robot. (A) Manipolazione delle gocce d'olio sott'acqua. Le goccioline di olio (100 μl) vengono sciolte con CCl4 con Br2 (a sinistra) e stirene (a destra). Il robot trasporta la goccia di sinistra per mescolarsi con quella di destra. (B) Manipolazione delle gocce d'acqua sotto olio (n-eptadecano). Le goccioline (50 μl) vengono sciolte in acqua con KSCN (a sinistra) e FeCl3 (a destra), rispettivamente. La goccia di sinistra viene catturata dal robot e trasportata a quella di destra. (C) Manipolazione di bolle di gas sott'acqua. Un robot superidrofobo può raccogliere successivamente le bolle di gas (20 μl). La linea tratteggiata bianca indica la traiettoria del robot. (D) Manipolazione di una goccia d'acqua sulla superficie verticale. Il robot trasporta una goccia d'acqua da 20 μl per spostarsi su e giù con una velocità di 2 mm/s. (E) Manipolazione di una goccia d'acqua all'interno di un tubo. Una goccia (20 μl) viene azionata dal robot per catturare l'impurità all'interno di un tubo. Dopo 1 minuto, l'impurità viene sciolta e portata via dalla gocciolina. Il cerchio tratteggiato rosso indica la posizione dell'impurità. La freccia nera indica il movimento della goccia. Barre della scala, 10mm. Credito:progressi scientifici, doi:10.1126/sciadv.aay5808
I ricercatori hanno quindi simulato processi biomedici in laboratorio per esplorare il potenziale del robot durante le applicazioni mediche in vivo. Hanno prima simulato calcoli o depositi minerali trovati in organi come reni e cistifellea, che generalmente rimangono intatte per limiti strutturali che ne impediscono la rimozione chirurgica. Utilizzando il microrobot, hanno trascinato una goccia di farmaco sui calcoli simulati ai calcoli per una facile raccolta e rimozione (in base alla compatibilità tra le due superfici). Nel prossimo esperimento, hanno mostrato il potenziale del robot per rimuovere o pulire i vasi sanguigni accumulando un eccesso di colesterolo nelle arterie coronarie, rappresentato da un tubo pieno d'acqua. Hanno trasportato le goccioline del farmaco per catturare la placca simulata e hanno sciolto il farmaco per il suo smaltimento da parte del robot. I metodi innovativi possono avere funzioni versatili per applicazioni mediche in vivo.
Simulazione della somministrazione di farmaci. Credito:progressi scientifici, doi:10.1126/sciadv.aay5808
In questo modo, An Li e colleghi hanno proposto una strategia semplice e generale per manipolare le goccioline utilizzando un robot ad azionamento magnetico composto da due sfere di acciaio. Hanno controllato la struttura utilizzando un campo magnetico che regolava la distribuzione delle forze resistive nei segmenti anteriore e posteriore della goccia. Hanno realizzato molteplici comportamenti per le goccioline incluso il trasporto, diviso, rilascio e rotazione. Oltre a manipolare le gocce d'acqua nell'aria, il robot ha mostrato la promessa di trasportare liquidi complessi come olio, acqua nell'olio e gas nell'acqua. Le sfere in acciaio hanno mostrato la manovrabilità delle goccioline in spazi limitati, compresi gli ambienti tossici e radioattivi. Il lavoro ha un potenziale significativo nei campi della fabbricazione di dispositivi, rilevamento e saggio biologico, così come in medicina in vivo. Il team prevede che ulteriori ottimizzazioni del sistema consentiranno la manipolazione di goccioline più piccole su scala nanometrica e pico-litro con una maggiore biocompatibilità.
© 2020 Scienza X Rete