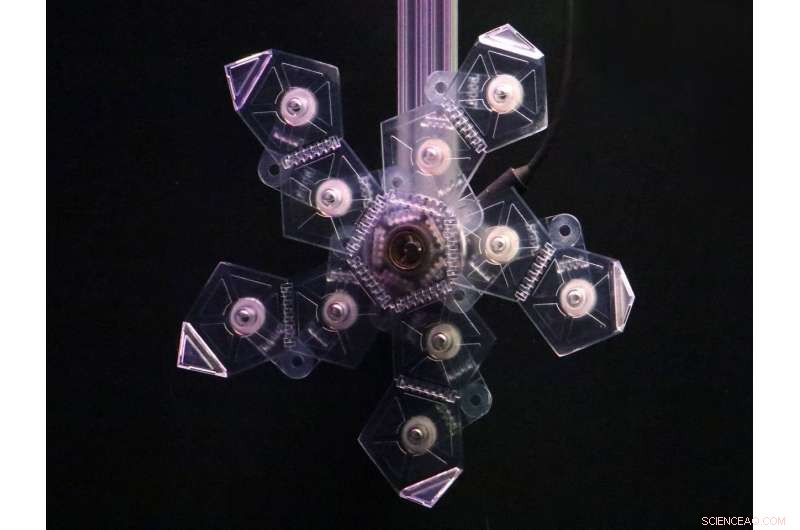
La RAD si apre. Credito:Wyss Institute presso l'Università di Harvard
L'oceano aperto è l'ambiente più grande e meno esplorato della Terra, si stima che contenga fino a un milione di specie che devono ancora essere descritte. Però, molti di questi organismi hanno un corpo molle, come le meduse, calamaro, e polpi e sono difficili da catturare per lo studio con gli strumenti subacquei esistenti, che troppo spesso li danneggiano o li distruggono. Ora, un nuovo dispositivo sviluppato dai ricercatori del Wyss Institute dell'Università di Harvard, John A. Paulson School of Engineering and Applied Sciences (SEAS), e il Radcliffe Institute for Advanced Study intrappolano in sicurezza delicate creature marine all'interno di un recinto poliedrico pieghevole e le lasciano andare senza danno usando un romanzo, design ispirato agli origami. La ricerca è riportata in Robotica scientifica .
"Ci avviciniamo a questi animali come se fossero opere d'arte:taglieremmo pezzi dalla Gioconda per studiarla? No, useremmo gli strumenti più innovativi disponibili. Questi organismi di acque profonde, alcuni hanno migliaia di anni, meritiamo di essere trattati con la stessa gentilezza quando interagiamo con loro, " ha detto l'autore collaboratore David Gruber, dottorato di ricerca, chi è un Radcliffe Fellow 2017-2018, Esploratore del National Geographic, e professore di biologia e scienze ambientali al Baruch College, CUNY.
L'idea di applicare le proprietà di piegatura alla raccolta di campioni subacquei è iniziata nel 2014 quando il primo autore Zhi Ern Teoh, dottorato di ricerca ha preso una lezione da Chuck Hoberman, SM., un membro della facoltà Wyss Associate e Pierce Anderson Lecturer in Design Engineering presso la Harvard Graduate School of Design, sulla creazione di meccanismi di piegatura attraverso mezzi computazionali. "Costruivo a mano microrobot alla scuola di specializzazione, che era un lavoro molto scrupoloso e noioso, e mi chiedevo se ci fosse un modo per piegare una superficie piana in una forma tridimensionale usando invece un motore, " disse Teoh, un ex Wyss Postdoctoral Fellow nel laboratorio di Robert Wood, dottorato di ricerca, che ora è un ingegnere alla Cooper Perkins.
Un altro membro del laboratorio Wood all'epoca, Brennan Phillips, dottorato di ricerca - ora assistente professore di ingegneria oceanica presso l'Università del Rhode Island, ha visto i progetti di Teoh e gli ha suggerito di adattarlo per catturare le creature marine, che sono notoriamente difficili da afferrare con l'attrezzatura subacquea esistente che è in gran parte progettata per il duro lavoro di estrazione e costruzione oceanica.
Il dispositivo che Teoh ha costruito è costituito da cinque identici "petali" polimerici stampati in 3D attaccati a una serie di giunti rotanti collegati tra loro per formare un'impalcatura. Quando un singolo motore applica una coppia al punto in cui i petali si incontrano, fa sì che l'intera struttura ruoti attorno alle sue articolazioni e si pieghi in un dodecaedro cavo (come un dodecaedro a dodici lati, scatola quasi rotonda), guadagnandosi il nome di Rotary Actuated Dodecahedron (RAD). La piegatura è interamente diretta dal disegno degli incastri e dalla forma dei petali stessi; nessun altro input è richiesto.
Il team ha testato il campionatore RAD al Mystic Aquarium di Mystic, CT e ha raccolto e rilasciato con successo meduse lunari sott'acqua. Dopo aver apportato modifiche al campionatore in modo che potesse resistere alle condizioni dell'oceano aperto, lo hanno poi montato su un veicolo subacqueo telecomandato (ROV) fornito dal Monterey Bay Aquarium Research Institute (MBARI) di Monterey, CA e testato sul campo a una profondità di 500-700 m (1, 600-2, 300 piedi) utilizzando il braccio manipolatore del ROV e il joystick controllato dall'uomo per azionare il campionatore. Il team è stato in grado di catturare organismi molli come calamari e meduse all'interno dei loro habitat naturali, e liberarli senza danno.
"Il design del campionatore RAD è perfetto per il difficile ambiente delle profondità oceaniche perché i suoi controlli sono molto semplici, quindi ci sono meno elementi che possono rompersi. è anche modulare, quindi se qualcosa si rompe, possiamo semplicemente sostituire quella parte e rispedire il campionatore in acqua, " ha detto Teoh. "Questo design pieghevole è adatto anche per essere utilizzato nello spazio, che è simile all'oceano profondo in quanto è a bassa gravità, ambiente inospitale che rende difficile il funzionamento di qualsiasi dispositivo."
Teoh e Phillips stanno attualmente lavorando su una versione più robusta del campionatore RAD da utilizzare in attività subacquee più pesanti, come la geologia marina, mentre Gruber e Wood si stanno concentrando sull'ulteriore raffinamento delle abilità più delicate del campionatore. "Vorremmo aggiungere telecamere e sensori al campionatore in modo che, nel futuro, possiamo catturare un animale, raccogliere molti dati su di esso come le sue dimensioni, proprietà dei materiali, e anche il suo genoma, e poi lascialo andare, quasi come un rapimento alieno subacqueo, " disse Gruber.

Il RAD montato su un veicolo subacqueo. Credito:Wyss Institute presso l'Università di Harvard
"La collaborazione del nostro gruppo con la comunità della biologia marina ha aperto le porte ai campi della robotica morbida e dell'ingegneria ispirata agli origami per applicare tali tecnologie per risolvere problemi in una disciplina completamente diversa, e siamo entusiasti di vedere i modi in cui questa sinergia crea nuove soluzioni, "disse Legno, che è membro fondatore della facoltà del Wyss Institute, il Charles River Professor di Ingegneria e Scienze Applicate presso SEAS, e anche un National Geographic Explorer.
"La collaborazione tra le discipline è una caratteristica distintiva del Wyss Institute, e questo lavoro esemplifica come possono emergere nuove innovazioni quando scienziati provenienti da campi molto diversi iniziano a comunicare tra loro, " disse Don Ingber, M.D., dottorato di ricerca, il Direttore Fondatore del Wyss Institute che è anche Judah Folkman Professor of Vascular Biology presso la Harvard Medical School e il Vascular Biology Program presso il Boston Children's Hospital, nonché Professore di Bioingegneria presso SEAS.