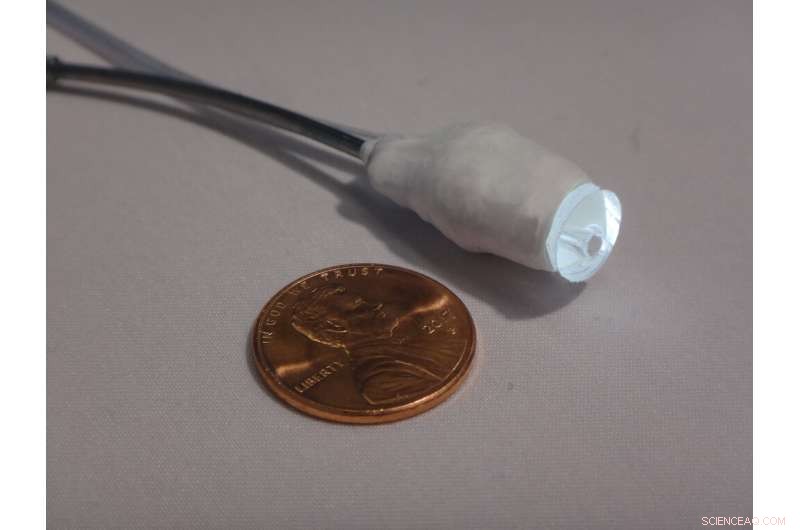
La punta del catetere comprendeva un sensore di visione tattile costituito da una telecamera a scala millimetrica e LED racchiusi in silicone. Credito:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
I bioingegneri del Boston Children's Hospital riportano la prima dimostrazione di un robot in grado di navigare autonomamente all'interno del corpo. In un modello animale di riparazione della valvola cardiaca, il team ha programmato un catetere robotico per farsi strada lungo le pareti di un battito, cuore pieno di sangue a una valvola che perde, senza la guida di un chirurgo. Riportano il loro lavoro oggi in Robotica scientifica .
I chirurghi hanno utilizzato robot azionati da joystick per più di un decennio, e le squadre hanno dimostrato che piccoli robot possono essere guidati attraverso il corpo da forze esterne come il magnetismo. Però, ricercatore senior Pierre Dupont, dottorato di ricerca, capo della Pediatric Cardiac Bioengineering presso Boston Children's, dice che a sua conoscenza, questo è il primo rapporto dell'equivalente di un'auto a guida autonoma che naviga verso una destinazione desiderata all'interno del corpo.
Dupont immagina robot autonomi che assistono i chirurghi in operazioni complesse, riducendo la fatica e liberando i chirurghi di concentrarsi sulle manovre più difficili, migliorare i risultati.
"Il modo giusto di pensare a questo è attraverso l'analogia tra un pilota da combattimento e un aereo da combattimento, " dice. "L'aereo da caccia svolge compiti di routine come pilotare l'aereo, così il pilota può concentrarsi sui compiti di livello superiore della missione."
Visione guidata dal tocco, informato da AI
Il catetere robotico del team ha navigato utilizzando un sensore tattile ottico sviluppato nel laboratorio di Dupont, informato da una mappa dell'anatomia cardiaca e delle scansioni preoperatorie. Il sensore tattile utilizza l'intelligenza artificiale (AI) e algoritmi di elaborazione delle immagini per consentire al catetere di capire dove si trova nel cuore e dove deve andare.
Per la dimostrazione, il team ha eseguito una procedura tecnicamente molto impegnativa nota come chiusura della perdita aortica paravalvolare, che ripara le valvole cardiache sostitutive che hanno iniziato a perdere lungo i bordi. (Il team ha costruito le proprie valvole per gli esperimenti.) Una volta che il catetere robotico ha raggiunto la posizione della perdita, un cardiochirurgo esperto ha preso il controllo e ha inserito un tappo per chiudere la perdita.
In prove ripetute, il catetere robotico è riuscito a raggiungere le perdite della valvola cardiaca all'incirca nello stesso lasso di tempo del chirurgo (utilizzando uno strumento manuale o un robot controllato da joystick).
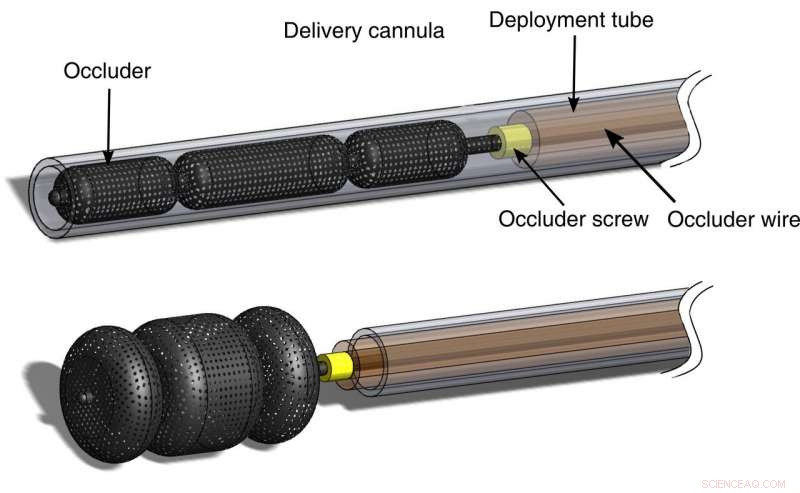
Un diagramma del sistema di distribuzione dell'occlusore. Credito:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
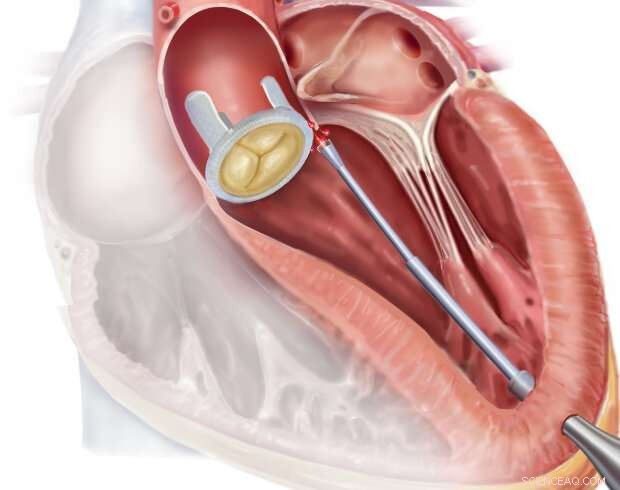
Illustrazione della navigazione del catetere robotico verso il sito della valvola protesica che perde. Credito:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)

Strumento di rilevamento della forza collegato al catetere. Credito:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
Navigazione di ispirazione biologica
Attraverso una tecnica di navigazione chiamata "wall following, " il sensore tattile ottico del catetere robotico ha campionato il suo ambiente a intervalli regolari, nello stesso modo in cui le antenne degli insetti o i baffi dei roditori campionano l'ambiente circostante per costruire mappe mentali di cose sconosciute, ambienti bui. Il sensore ha detto al catetere se stava toccando sangue, la parete del cuore o una valvola (attraverso le immagini di una telecamera montata sulla punta) e quanto è stato premuto (per evitare che danneggi il cuore pulsante).
I dati dell'imaging preoperatorio e degli algoritmi di apprendimento automatico hanno aiutato il catetere a interpretare le caratteristiche visive. In questo modo, il catetere robotico è avanzato da solo dalla base del cuore, lungo la parete del ventricolo sinistro e intorno alla valvola che perde fino a raggiungere la posizione della perdita.
"Gli algoritmi aiutano il catetere a capire che tipo di tessuto sta toccando, dov'è nel cuore, e come dovrebbe scegliere il suo prossimo movimento per arrivare dove vogliamo che vada, " spiega Dupont.
Sebbene il robot autonomo abbia impiegato un po' più di tempo del chirurgo per raggiungere la valvola che perde, la sua tecnica a muro significava che prendeva il percorso più lungo.
"Il tempo di navigazione era statisticamente equivalente per tutti, che pensiamo sia piuttosto impressionante dato che sei all'interno del cuore pulsante pieno di sangue e stai cercando di raggiungere un obiettivo su scala millimetrica su una valvola specifica, "dice Dupont.
Aggiunge che la capacità del robot di visualizzare e percepire il proprio ambiente potrebbe eliminare la necessità di imaging fluoroscopico, che viene tipicamente utilizzato in questa operazione ed espone i pazienti a radiazioni ionizzanti.
Una visione del futuro?
Dupont afferma che il progetto è stato il più impegnativo della sua carriera. Mentre il collega cardiochirurgo, chi ha eseguito le operazioni sui suini, è stato in grado di rilassarsi mentre il robot trovava le perdite della valvola, il progetto era faticoso per i borsisti di ingegneria di Dupont, che a volte dovevano riprogrammare il robot durante l'operazione mentre perfezionavano la tecnologia.
"Ricordo le volte in cui gli ingegneri del nostro team uscivano dalla sala operatoria completamente esausti, ma siamo riusciti a farcela, " dice Dupont. "Ora che abbiamo dimostrato la navigazione autonoma, molto di più è possibile".
Alcuni interventisti cardiaci che sono a conoscenza del lavoro di Dupont prevedono di utilizzare i robot per qualcosa di più della navigazione, eseguire attività di routine di mappatura del cuore, Per esempio. Alcuni immaginano che questa tecnologia fornisca una guida durante casi particolarmente difficili o insoliti o che assista nelle operazioni in parti del mondo che mancano di chirurghi di grande esperienza.
Mentre la Food and Drug Administration inizia a sviluppare un quadro normativo per i dispositivi abilitati all'IA, Dupont prevede la possibilità che robot chirurgici autonomi in tutto il mondo raccolgano i loro dati per migliorare continuamente le prestazioni nel tempo, proprio come i veicoli a guida autonoma sul campo inviano i loro dati a Tesla per perfezionare i suoi algoritmi.
"Questo non solo livellerebbe il campo di gioco, lo solleverebbe, " dice Dupont. "Ogni clinico nel mondo opererebbe con un livello di abilità ed esperienza equivalente al migliore nel proprio campo. Questa è sempre stata la promessa dei robot medici. L'autonomia potrebbe essere ciò che ci porta lì."