Il dispositivo SensFoot. Crediti:Moschetti et al
Ricercatori dell'Istituto di BioRobotica della Scuola Superiore Sant'Anna, Co-Robotics srl e la Sheffield Hallam University hanno recentemente proposto un nuovo approccio per migliorare le interazioni tra umani e robot mentre camminano insieme. La loro carta, pubblicato in MDPI's Robotica rivista, propone l'uso di sensori indossabili come mezzo per migliorare la collaborazione tra un essere umano e un robot che si muovono in un ambiente condiviso.
I recenti progressi tecnologici hanno consentito l'impiego di robot come assistenti in un'ampia gamma di situazioni della vita quotidiana. Per funzionare bene nella maggior parte di queste impostazioni, però, i robot dovrebbero essere in grado di interagire con gli utenti umani in modo fluido ed efficace. I ricercatori hanno quindi sviluppato approcci e tecniche per migliorare la capacità dei robot di comprendere i segnali sociali e rispondere di conseguenza.
Nel loro studio, il team si è concentrato in particolare su compiti che coinvolgono umani e robot che camminano insieme o perseguono un compito che implica stare in piedi e muoversi in un ambiente condiviso. Il loro obiettivo era sviluppare un approccio che permettesse agli esseri umani di muoversi naturalmente in un dato spazio insieme a un robot, senza la necessità di collegamenti fisici tra i due.
"Questo documento propone l'uso di unità di misura inerziale indossabili (IMU) per migliorare l'interazione tra uomo e robot mentre camminano insieme senza collegamenti fisici e senza restrizioni sulla posizione relativa tra l'uomo e il robot, " hanno scritto i ricercatori nel loro articolo.
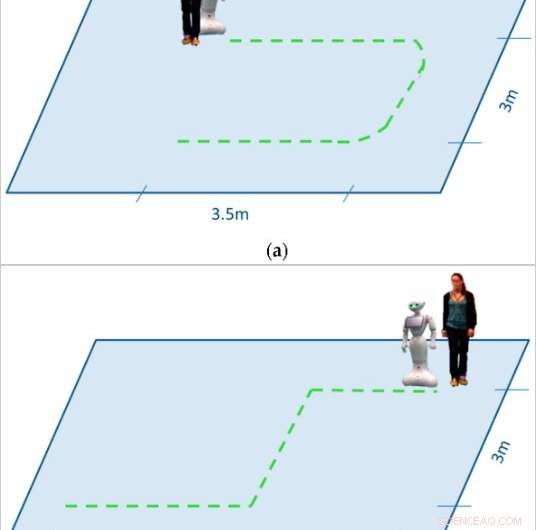
Schema del seguente compito (a) e compito follow-me (b). Credito:Moschetti et al.
L'approccio proposto dai ricercatori prevede l'utilizzo di sensori IMU, che sono dispositivi elettronici che misurano e segnalano l'orientamento, velocità e altri dati relativi ai movimenti, tipicamente utilizzando accelerometri, giroscopi e/o magnetometri. Questi sensori sono indossati dagli esseri umani (ad esempio sulle scarpe) senza causare loro disagio, permettendo così loro di muoversi liberamente nello spazio circostante.
Le IMU raccolgono informazioni in tempo reale sui movimenti dell'utente umano e sui parametri relativi all'andatura (ad es. lunghezza del passo, angolo di orientamento, eccetera.). Successivamente, questi dati vengono elaborati e utilizzati per modellare il movimento del robot, creando infine un'interazione più naturale tra i due agenti.
I ricercatori hanno costruito un prototipo di sistema IMU chiamato SensFoot e ne hanno valutato l'accuratezza e l'efficacia in una serie di esperimenti che hanno coinvolto esseri umani e robot che interagiscono tra loro. Hanno reclutato 19 partecipanti umani e hanno chiesto loro di completare due diverse attività, che chiamano "attività da seguire" e attività "seguimi".
Primo, hanno verificato l'accuratezza del loro sistema confrontando le informazioni di camminata calcolate da un sistema di visione di riferimento con quelle derivate dai dati raccolti dalle IMU. Successivamente, hanno testato i sensori in uno scenario di interazione uomo-robot reale.
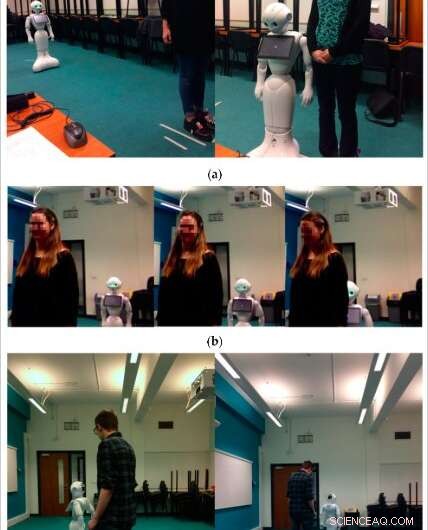
Esempio di test con utenti (a) e sequenze del seguente task (b) e follow-me task (c). Credito:Moschetti et al.
"Abbiamo sperimentato con 19 partecipanti umani in due diverse attività, fornire valutazioni in tempo reale dei parametri dell'andatura per un robot mobile che si muove insieme a un essere umano, e studiato la fattibilità e l'usabilità percepita dai partecipanti, " hanno scritto i ricercatori. "I risultati mostrano la fattibilità del sistema, che ha ottenuto riscontri positivi da parte degli utenti, dare preziose informazioni per lo sviluppo di un sistema di interazione naturale, dove il robot percepisce i movimenti umani tramite sensori indossabili."
Le valutazioni effettuate dai ricercatori hanno prodotto risultati molto promettenti, suggerendo che l'uso delle IMU potrebbe migliorare significativamente le interazioni tra umani e robot che si muovono in uno spazio condiviso. Inoltre, il feedback raccolto dai partecipanti che hanno testato i sensori è stato estremamente positivo. Nel futuro, l'approccio proposto dai ricercatori potrebbe aprire la strada a soluzioni di robotica assistiva più adattive ed efficienti che prevedono l'integrazione di IMU o altri sensori con algoritmi di apprendimento automatico.
"I lavori futuri riguardano la possibilità di migliorare la percezione del sistema dell'utente che cammina, migliorare la precisione nei parametri estratti, e l'adattabilità del robot, superando le attuali limitazioni nel controllo e nell'integrazione, " hanno scritto i ricercatori.
© 2019 Scienza X Rete