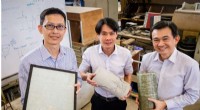
La tecnica sviluppata dal MIT abbina rapidamente e senza intoppi gli oggetti a quelli nascosti nelle nuvole di punti dense (a sinistra), rispetto alle tecniche esistenti (a destra) che producono errori, partite sconnesse. Credito:per gentile concessione dei ricercatori
Una nuova tecnica sviluppata dal MIT consente ai robot di identificare rapidamente gli oggetti nascosti in una nuvola di dati tridimensionale, ricorda come alcune persone possono dare un senso a un'immagine "Magic Eye" densamente modellata se la osservano nel modo giusto.
I robot in genere "vedono" il loro ambiente attraverso sensori che raccolgono e traducono una scena visiva in una matrice di punti. Pensa al mondo di, bene, "La matrice, " tranne che gli 1 e gli 0 visti dal personaggio immaginario Neo sono sostituiti da punti—molti punti—i cui schemi e densità delineano gli oggetti in una scena particolare.
Tecniche convenzionali che cercano di individuare oggetti da tali nuvole di punti, o nuvole di punti, può farlo con velocità o precisione, ma non entrambi.
Con la loro nuova tecnica, i ricercatori dicono che un robot può individuare con precisione un oggetto, come un piccolo animale, altrimenti oscurato da una densa nuvola di puntini, entro pochi secondi dalla ricezione dei dati visivi. Il team afferma che la tecnica può essere utilizzata per migliorare una serie di situazioni in cui la percezione della macchina deve essere sia veloce che precisa, comprese auto senza conducente e assistenti robotici in fabbrica e a casa.
"La cosa sorprendente di questo lavoro è, se ti chiedo di trovare un coniglio in questa nuvola di migliaia di punti, non c'è modo che tu possa farlo, "dice Luca Carlone, assistente professore di aeronautica e astronautica e membro del Laboratory for Information and Decision Systems (LIDS) del MIT. "Ma il nostro algoritmo è in grado di vedere l'oggetto attraverso tutto questo disordine. Quindi stiamo arrivando a un livello di prestazioni sovrumane nella localizzazione degli oggetti".
Carlone e lo studente laureato Heng Yang presenteranno i dettagli della tecnica alla fine di questo mese alla conferenza Robotics:Science and Systems in Germania.
"Fallire senza sapere"
I robot attualmente tentano di identificare gli oggetti in una nuvola di punti confrontando un oggetto modello:una rappresentazione a punti 3D di un oggetto, come un coniglio, con una rappresentazione a nuvola di punti del mondo reale che potrebbe contenere quell'oggetto. L'immagine del modello include "caratteristiche, " o raccolte di punti che indicano curvature o angoli caratteristici di quell'oggetto, come l'orecchio o la coda del coniglio. Gli algoritmi esistenti prima estraggono caratteristiche simili dalla nuvola di punti della vita reale, quindi provare a far corrispondere quelle caratteristiche e le caratteristiche del modello, e infine ruotare e allineare le caratteristiche al modello per determinare se la nuvola di punti contiene l'oggetto in questione.
Ma i dati della nuvola di punti che fluiscono nel sensore di un robot includono invariabilmente errori, sotto forma di punti che sono nella posizione sbagliata o spaziati in modo errato, che può confondere in modo significativo il processo di estrazione e corrispondenza delle caratteristiche. Come conseguenza, i robot possono fare un numero enorme di associazioni sbagliate, o ciò che i ricercatori chiamano "outlier" tra le nuvole di punti, e alla fine identificano erroneamente gli oggetti o li mancano del tutto.
Carlone afferma che gli algoritmi all'avanguardia sono in grado di setacciare le cattive associazioni da quelle buone una volta che le caratteristiche sono state abbinate, ma lo fanno in "tempo esponenziale, " il che significa che anche un cluster di computer pesanti di elaborazione, vagliare i dati della nuvola di punti densa con algoritmi esistenti, non sarebbe in grado di risolvere il problema in un tempo ragionevole. Tali tecniche, mentre preciso, sono poco pratici per l'analisi più ampia, set di dati reali contenenti nuvole di punti dense.
Altri algoritmi in grado di identificare rapidamente caratteristiche e associazioni lo fanno in fretta, creando un numero enorme di valori anomali o rilevazioni errate nel processo, senza essere a conoscenza di questi errori.
"È terribile se questo funziona su un'auto a guida autonoma, o qualsiasi applicazione critica per la sicurezza, "Dice Carlone. "Fallire senza sapere che stai fallendo è la cosa peggiore che un algoritmo possa fare."

I robot attualmente tentano di identificare gli oggetti in una nuvola di punti confrontando un oggetto modello:una rappresentazione a punti 3D di un oggetto, come un coniglio, con una rappresentazione a nuvola di punti del mondo reale che potrebbe contenere quell'oggetto. Credito:Christine Daniloff, MIT
Una vista rilassata
Yang e Carlone hanno invece ideato una tecnica che elimina i valori anomali in "tempo polinomiale, " significa che può farlo rapidamente, anche per nuvole di punti sempre più dense. La tecnica può quindi identificare rapidamente e con precisione gli oggetti nascosti nelle scene ingombranti.
I ricercatori hanno prima utilizzato tecniche convenzionali per estrarre le caratteristiche di un oggetto modello da una nuvola di punti. Hanno quindi sviluppato un processo in tre fasi per abbinare le dimensioni, posizione, e orientamento dell'oggetto in una nuvola di punti con l'oggetto modello, mentre allo stesso tempo identifica le associazioni di caratteristiche buone da quelle cattive.
Il team ha sviluppato un algoritmo di "schema di voto adattivo" per eliminare i valori anomali e abbinare le dimensioni e la posizione di un oggetto. Per le dimensioni, l'algoritmo crea associazioni tra le caratteristiche del modello e della nuvola di punti, quindi confronta la distanza relativa tra le feature in un modello e le feature corrispondenti nella nuvola di punti. Se, dire, la distanza tra due elementi nella nuvola di punti è cinque volte quella dei punti corrispondenti nel modello, l'algoritmo assegna un "voto" all'ipotesi che l'oggetto sia cinque volte più grande dell'oggetto template.
L'algoritmo esegue questa operazione per ogni associazione di funzionalità. Quindi, l'algoritmo seleziona le associazioni che rientrano nell'ipotesi di dimensione con il maggior numero di voti, e identifica quelli come le associazioni corrette, mentre scarichi gli altri. In questo modo, la tecnica rivela contemporaneamente le associazioni corrette e la dimensione relativa dell'oggetto rappresentato da tali associazioni. Lo stesso processo viene utilizzato per determinare la posizione dell'oggetto.
I ricercatori hanno sviluppato un algoritmo separato per la rotazione, che trova l'orientamento dell'oggetto modello nello spazio tridimensionale.
Fare questo è un compito computazionale incredibilmente complicato. Immagina di tenere una tazza e di provare a inclinarla così, per abbinare un'immagine sfocata di qualcosa che potrebbe essere la stessa tazza. Ci sono un numero qualsiasi di angoli in cui potresti inclinare quella tazza, e ciascuno di questi angoli ha una certa probabilità di corrispondere all'immagine sfocata.
Le tecniche esistenti gestiscono questo problema considerando ogni possibile inclinazione o rotazione dell'oggetto come un "costo":minore è il costo, più è probabile che tale rotazione crei una corrispondenza accurata tra le caratteristiche. Ogni rotazione e il relativo costo sono rappresentati in una sorta di mappa topografica, composto da più colline e valli, con quote inferiori associate a costi inferiori.
Ma Carlone dice che questo può facilmente confondere un algoritmo, specialmente se ci sono più valli e nessun punto più basso riconoscibile che rappresenta il vero, corrispondenza esatta tra una particolare rotazione di un oggetto e l'oggetto in una nuvola di punti. Anziché, il team ha sviluppato un algoritmo di "rilassamento convesso" che semplifica la mappa topografica, con una sola valle che rappresenta la rotazione ottimale. In questo modo, l'algoritmo è in grado di identificare rapidamente la rotazione che definisce l'orientamento dell'oggetto nella nuvola di punti.
Con il loro approccio, il team è stato in grado di identificare rapidamente e accuratamente tre oggetti diversi:un coniglio, un drago, e un Buddha, nascosto in nuvole di punti di densità crescente. Sono stati anche in grado di identificare oggetti in scene di vita reale, compreso un soggiorno, in cui l'algoritmo è stato in grado di individuare rapidamente una scatola di cereali e un cappello da baseball.
Carlone afferma che poiché l'approccio è in grado di funzionare in "tempo polinomiale, " può essere facilmente scalato per analizzare nuvole di punti ancora più dense, simile alla complessità dei dati dei sensori per le auto senza conducente, Per esempio.
"Navigazione, produzione collaborativa, robot domestici, cerca e salva, e le auto a guida autonoma è dove speriamo di avere un impatto, "dice Carlo.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.