https://www.ncnr.org.uk/
I robot devono conoscere il motivo per cui stanno facendo un lavoro se vogliono lavorare in modo efficace e sicuro al fianco delle persone nel prossimo futuro. In parole povere, questo significa che le macchine devono capire il motivo come fanno gli umani, e non solo svolgere compiti alla cieca, senza contesto.
Secondo un nuovo articolo del National Center for Nuclear Robotics, con sede presso l'Università di Birmingham, questo potrebbe preannunciare un profondo cambiamento per il mondo della robotica, ma uno che è necessario.
Autore principale Dott. Valerio Ortenzi, presso l'Università di Birmingham, sostiene che il cambiamento di pensiero sarà necessario man mano che le economie abbracceranno l'automazione, connettività e digitalizzazione ("Industria 4.0") e livelli di interazione uomo-robot, sia nelle fabbriche che nelle case, aumentare drasticamente.
La carta, pubblicato in Intelligenza della macchina della natura , esplora il problema dei robot che utilizzano oggetti. "Grasping" è un'azione perfezionata molto tempo fa in natura, ma che rappresenta l'avanguardia della ricerca robotica.
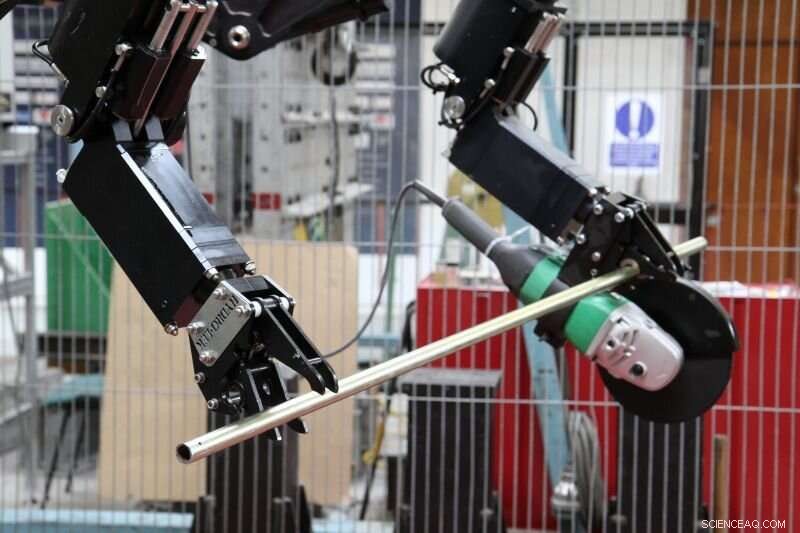
La maggior parte delle macchine di fabbrica sono "stupide, " raccogliere alla cieca oggetti familiari che appaiono in luoghi predeterminati al momento giusto. Ottenere una macchina per raccogliere oggetti sconosciuti, presentato in modo casuale, richiede la perfetta interazione di più, tecnologie complesse. Questi includono sistemi di visione e intelligenza artificiale avanzata in modo che la macchina possa vedere il bersaglio e determinarne le proprietà (ad esempio, è rigido o flessibile?); e potenzialmente, sono necessari sensori nella pinza in modo che il robot non schiacci inavvertitamente un oggetto che gli è stato detto di raccogliere.
Anche quando tutto questo sarà compiuto, i ricercatori del Centro nazionale per la robotica nucleare hanno evidenziato un problema fondamentale:ciò che tradizionalmente è considerato una presa "di successo" per un robot potrebbe in realtà essere un fallimento nel mondo reale, perché la macchina non tiene conto di qual è l'obiettivo e perché sta raccogliendo un oggetto.
Il documento cita l'esempio di un robot in una fabbrica che preleva un oggetto per la consegna a un cliente. Esegue con successo il compito, tenendo saldamente il pacco senza causare danni. Sfortunatamente, la pinza del robot oscura un codice a barre cruciale, il che significa che l'oggetto non può essere rintracciato e l'azienda non ha idea se l'oggetto sia stato ritirato o meno; l'intero sistema di consegna si guasta perché il robot non conosce le conseguenze di tenere una scatola nel modo sbagliato.
Il dottor Ortenzi fa altri esempi, coinvolgendo robot che lavorano a fianco delle persone.
"Immagina di chiedere a un robot di passarti un cacciavite in un'officina. In base alle convenzioni attuali, il modo migliore per un robot di raccogliere l'utensile è l'impugnatura, " ha detto. "Purtroppo, ciò potrebbe significare che una macchina estremamente potente ti lancerà una lama potenzialmente letale, a velocità. Anziché, il robot deve sapere qual è l'obiettivo finale, cioè., per passare il cacciavite in sicurezza al suo collega umano, per ripensare le sue azioni.
"Un altro scenario prevede un robot che passa un bicchiere d'acqua a un residente in una casa di cura. Deve garantire che non faccia cadere il bicchiere ma anche che l'acqua non fuoriesca sul destinatario durante l'atto del passaggio, o che il bicchiere sia presentato in modo che la persona possa afferrarlo.
"Ciò che è ovvio per gli esseri umani deve essere programmato in una macchina e questo richiede un approccio profondamente diverso. Le metriche tradizionali utilizzate dai ricercatori, negli ultimi vent'anni, per valutare la manipolazione robotica, non sono sufficienti. Nel senso più pratico, i robot hanno bisogno di una nuova filosofia per avere una presa".
Professor Rustam Stolkin, Direttore del NCNR, disse, "Il Centro nazionale per la robotica nucleare è l'unico a lavorare su problemi pratici con l'industria, generando contemporaneamente il più alto livello di ricerca accademica all'avanguardia, esemplificata da questo documento fondamentale."