Credito:Zhang, Wang e Jiang.
I microveicoli aerei (MAV) potrebbero avere numerose applicazioni utili, ad esempio, assistere gli umani nel completamento degli inventari del magazzino o nelle missioni di ricerca e salvataggio. Mentre molte aziende in tutto il mondo hanno già iniziato a produrre e utilizzare MAV, alcuni di questi robot volanti hanno ancora notevoli limitazioni.
Per lavorare nel modo più efficace, I MAV dovrebbero essere supportati da un efficiente sistema di stima della posa. Questo è un sistema o un metodo in grado di calcolare la posizione e l'atteggiamento di un drone, che può quindi essere utilizzato per controllarne il volo, regolarne la velocità e agevolarne la navigazione mentre opera in autonomia e quando comandato a distanza.
I ricercatori della Huazhong University of Science and Technology in Cina hanno recentemente sviluppato un nuovo sistema per la stima della posa dei MAV in ambienti interni. Il loro nuovo approccio, delineato in un documento pre-pubblicato su arXIv e pronto per essere pubblicato in Transazioni IEEE sull'elettronica industriale , sfrutta l'infrastruttura WiFi esistente per consentire una navigazione più efficace in droni piccoli e agili.
"Nel nostro lavoro precedente, abbiamo dimostrato la fattibilità dell'utilizzo della localizzabilità del WiFi per correggere la deriva del sensore inerziale di bordo (IMU), "Shengkai Zhang, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Però, la tecnica che abbiamo sviluppato, soprannominato CWISE, funziona solo in spazi aperti e senza dissolvenza multipath. Nel nostro studio attuale, spingiamo ulteriormente questo metodo per affrontare il problema del multipath negli ambienti interni e rendere più pratico il nostro sistema proposto".
L'obiettivo principale del nuovo studio condotto da Zhang e dai suoi colleghi era quello di utilizzare l'infrastruttura WiFi prontamente disponibile per stimare le pose 6-DoF dei MAV. In contrasto con le tecniche di stima della posa esistenti basate sulla visione artificiale, il sistema che hanno sviluppato è esente da limitazioni visive, il che significa che funziona bene in diverse condizioni di illuminazione e ambientali.
Invece di analizzare gli stimoli visivi raccolti dai sensori, il sistema sfrutta le numerose sottoportanti dei segnali WiFi a divisione di frequenza ortogonale (OFDM). Più specificamente, utilizza questi segnali per trovare l'angolo di arrivo (AoA) del percorso diretto tra un MAV e un access point WiFi tra le tante riflessioni del segnale in ambienti interni.
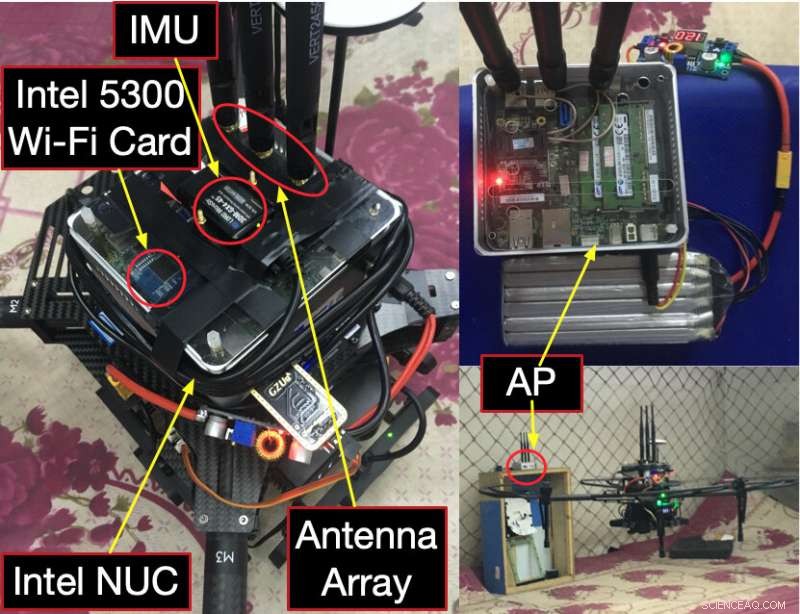
Il sistema creato da Zhang e dai suoi colleghi ha due componenti principali:un algoritmo di stima AoA e un modello di fusione del sensore inerziale WiFi. L'algoritmo di stima AoA è un metodo computazionale che stima gli atteggiamenti MAV e districa l'AoA per il posizionamento. Il modello di fusione del sensore inerziale WiFi, d'altra parte, combina l'AoA stimato e i dati raccolti utilizzando sensori inerziali per ottimizzare le pose di un drone.
"È risaputo che gli angoli possono essere utilizzati per localizzare un bersaglio tramite triangolazione, però, senza scala metrica, " disse Zhang. "D'altra parte, l'IMU di un MAV fornisce pose metriche ma soffre di deriva temporale. Uniamo WiFi AoA e misurazioni inerziali e prendiamo il meglio di entrambi i mondi."
Il sistema sviluppato da Zhang e dai suoi colleghi presenta numerosi vantaggi rispetto alle tecniche di stima della posa più convenzionali. Primo, è leggero e installabile istantaneamente in qualsiasi ambiente interno coperto da una rete WiFi. Inoltre, si comporta bene in aree di lavoro con diverse condizioni di illuminazione e texture.
Lo studio evidenzia il potenziale dell'utilizzo delle connessioni WiFi per migliorare le strategie di rilevamento e navigazione nei robot. Quando testato in una serie di esperimenti in ambienti interni, il nuovo sistema di stima della posa ha ottenuto risultati notevoli, presentando un errore di posizione medio di 61,7 cm e un errore di assetto di 0,92 gradi. Nel futuro, potrebbe essere utilizzato per migliorare la navigazione MAV nei magazzini, uffici o altri ambienti interni.
"Attualmente, la precisione del nostro stimatore di posa inerziale WiFi è a livello di decimetro, " Zhang ha detto. "Vorremmo migliorarlo. Nel frattempo, Il WiFi stesso ha alcune limitazioni, per esempio., blocco della struttura, interferenza, e così via. Riteniamo che un corretto accoppiamento del rilevamento visivo e del rilevamento wireless otterrebbe una stima della posa più robusta e accurata, che si traduce in robot autonomi più pratici."
© 2020 Scienza X Rete