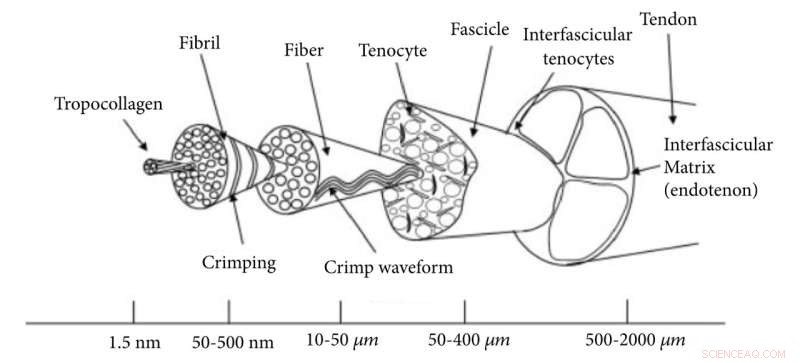
Struttura gerarchica del tessuto tendineo (adattato da Thorpe et al). Credito:Cyborg e sistemi bionici (2022). DOI:10.34133/2022/9842169
Un documento di revisione degli scienziati dell'Università di Oxford ha discusso i possibili vantaggi dell'utilizzo di robot muscoloscheletrici umanoidi e sistemi robotici morbidi come piattaforme di bioreattori nella produzione di costrutti tendinei clinicamente utili.
Il nuovo documento di revisione, pubblicato il 15 settembre 2022 sulla rivista Cyborg and Bionic Systems , riassume le tendenze attuali nell'ingegneria dei tessuti tendinei e discute come i bioreattori convenzionali non siano in grado di fornire una stimolazione meccanica fisiologicamente rilevante dato che si basano in gran parte su stadi di trazione uniassiali. Il documento evidenzia quindi i robot umanoidi muscoloscheletrici e i sistemi robotici morbidi come piattaforme per fornire una stimolazione meccanica fisiologicamente rilevante che potrebbe superare questo divario traslazionale.
Le lesioni ai tendini e ai tessuti molli sono un problema sociale ed economico in crescita, con il mercato della riparazione dei tendini negli Stati Uniti stimato a $ 1,5 miliardi di dollari. Gli interventi chirurgici di riparazione del tendine hanno alti tassi di revisione, con oltre il 40% delle riparazioni della cuffia dei rotatori che falliscono nel post-operatorio. La produzione di innesti tendinei ingegnerizzati per uso clinico è una potenziale soluzione per questa sfida. I bioreattori tendinei convenzionali forniscono principalmente una stimolazione a trazione uniassiale. La mancanza di sistemi che ricapitolano il carico tendineo in vivo è un importante gap traslazionale.
"Il corpo umano fornisce ai tendini uno stress meccanico tridimensionale sotto forma di tensione, compressione, torsione e taglio. La ricerca attuale suggerisce che il tessuto tendineo nativo sano richiede molteplici tipi e direzioni di stress. Sistemi robotici avanzati come umanoidi muscolo-scheletrici e morbidi piattaforme promettenti per la robotica che potrebbero essere in grado di simulare il carico tendineo in vivo", ha spiegato l'autore Iain Sander, ricercatore presso l'Università di Oxford con il Soft Tissue Engineering Research Group.
I robot umanoidi muscoloscheletrici sono stati inizialmente progettati per applicazioni come manichini per crash test, protesi e potenziamento atletico. Tentano di imitare l'anatomia umana avendo proporzioni corporee, struttura scheletrica, disposizione muscolare e struttura articolare simili. Umanoidi muscoloscheletrici come Roboy e Kenshiro utilizzano sistemi guidati dai tendini con attuatori miorobotici che imitano il tessuto neuromuscolare umano.
Le unità miorobotiche sono costituite da un motore a corrente continua senza spazzole che genera tensione come i muscoli umani, cavi di attacco che fungono da unità tendinea e una scheda driver del motore con un codificatore a molla, che funge da sistema neurologico rilevando variabili tra cui tensione, compressione, lunghezza del muscolo , e la temperatura.
I vantaggi proposti degli umanoidi muscoloscheletrici includono la capacità di fornire un carico multiassiale, il potenziale di carico in considerazione dei modelli di movimento umano e la fornitura di grandezze di carico paragonabili alle forze in vivo. Uno studio recente ha dimostrato la fattibilità della crescita di tessuto umano su un robot umanoide muscoloscheletrico per l'ingegneria dei tendini.
La robotica morbida bioibrida si concentra sullo sviluppo di sistemi robotici biomimetici conformi che consentono interazioni adattive e flessibili con ambienti imprevedibili. Questi sistemi robotici sono azionati attraverso una serie di modalità, tra cui temperatura, pressione pneumatica e idraulica e luce.
Sono realizzati con materiali morbidi tra cui idrogel, gomma e persino tessuto muscolo-scheletrico umano. Questi sistemi sono già utilizzati per fornire stimolazione meccanica ai costrutti di tessuto muscolare liscio e sono stati implementati in vivo in un modello suino.
Questi sistemi sono interessanti per l'ingegneria dei tessuti tendinei in quanto:i) le loro proprietà flessibili e flessibili consentono loro di avvolgere strutture anatomiche, imitando la configurazione del tendine nativo ii) sono in grado di fornire un'attuazione multiassiale e iii) una serie di tecniche utilizzate in la robotica morbida si sovrappone alle attuali pratiche di ingegneria dei tessuti tendinei.
Guardando al futuro, il team immagina sistemi robotici avanzati come piattaforme che forniranno stimoli meccanici fisiologicamente rilevanti agli innesti tendinei prima dell'uso clinico. Ci sono una serie di sfide da considerare quando vengono implementati sistemi robotici avanzati. In primo luogo, sarà importante per gli esperimenti futuri confrontare le tecnologie proposte in questa recensione con i bioreattori convenzionali.
Con lo sviluppo di sistemi in grado di fornire carichi multiassiali, sarà importante trovare metodi per quantificare la deformazione in 3D. Infine, i sistemi robotici avanzati dovranno essere più convenienti e accessibili per un'implementazione diffusa.
"Un numero crescente di gruppi di ricerca sta dimostrando che è possibile utilizzare la robotica avanzata in combinazione con cellule e tessuti viventi per applicazioni di ingegneria dei tessuti e bioattuazione. Siamo ora in una fase entusiasmante in cui possiamo esplorare le diverse possibilità di incorporare queste tecnologie in ingegneria del tessuto tendineo ed esaminare se possono davvero aiutare a migliorare la qualità degli innesti tendinei ingegnerizzati", ha affermato Pierre-Alexis Mouthuy, autore senior dell'articolo di revisione.
A lungo termine, queste tecnologie hanno il potenziale per migliorare la qualità della vita degli individui, diminuendo il dolore e il rischio di fallimento della riparazione tendinea, per i sistemi sanitari, riducendo il numero di interventi chirurgici di revisione, e per l'economia, migliorando la produttività sul posto di lavoro e riducendo spese sanitarie. + Esplora ulteriormente