
Illustrazione concettuale dell'indumento robotico proposto. Credito:Jonathan Realmuto/UCR
Gli ingegneri della UC Riverside stanno sviluppando "abbigliamento" robotico a basso costo per aiutare i bambini con paralisi cerebrale ad acquisire il controllo sui movimenti delle braccia.
La paralisi cerebrale è la causa più comune di grave disabilità fisica nell'infanzia e i dispositivi previsti per questo progetto hanno lo scopo di offrire un'assistenza quotidiana a lungo termine a coloro che convivono con essa.
Tuttavia, i robot tradizionali sono rigidi e non a proprio agio sul corpo umano. Consentito da una sovvenzione di 1,5 milioni di dollari dalla National Science Foundation, questo progetto sta adottando il nuovo approccio della costruzione di dispositivi da tessuti morbidi, che faciliteranno anche un funzionamento più naturale degli arti.
"I materiali duri non interagiscono bene con gli esseri umani", ha affermato Jonathan Realmuto, assistente professore di ingegneria meccanica dell'UCR e responsabile del progetto. "Quello che stiamo cercando utilizzando materiali come nylon ed elastico sono essenzialmente indumenti robotici."
Questi indumenti conterranno regioni sigillate ed ermetiche che possono gonfiarsi, rendendoli temporaneamente rigidi e fornendo la forza per il movimento.
"Diciamo che vuoi flettere il gomito per un curl per i bicipiti. Possiamo iniettare aria in camere d'aria appositamente progettate incorporate nel tessuto che spingerebbero il braccio in avanti", ha detto Realmuto.
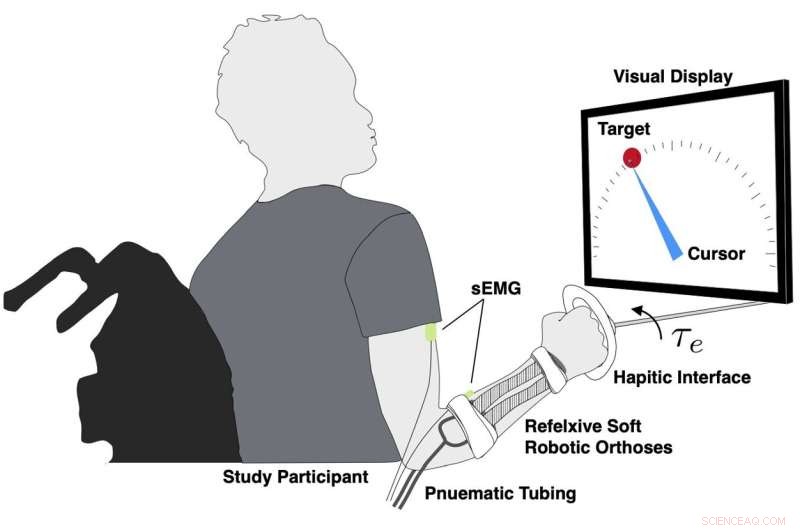
Configurazione sperimentale per le precedenti iterazioni del dispositivo. Credito:Jonathan Realmuto/UCR
Il progetto si concentrerà non solo sulla costruzione del robot, ma anche sullo sviluppo di algoritmi che insegnano alla macchina a prevedere i movimenti che chi lo indossa vuole eseguire.
"Una delle sfide critiche nel fornire assistenza ai movimenti è interpretare le intenzioni di una persona. Vogliamo un "controllore volitivo", in modo che il robot si comporti in base a ciò che l'umano vuole fare", ha affermato Realmuto. Il team del progetto comprende anche il professore assistente di ingegneria meccanica dell'UCR Jun Sheng.
Un aspetto di un tale controller è l'utilizzo di una varietà di piccoli sensori sulle maniche per rilevare piccole tensioni generate dai muscoli quando si contraggono. Questi sensori alimenteranno i dati sulla tensione in un algoritmo che verrà addestrato per estrarre da essi l'intenzione di chi li indossa.
L'uso di tessuti ampiamente disponibili, piuttosto che di materiali rigidi tradizionali, probabilmente manterrà basso il costo delle maniche. Inoltre, il team intende ridurre al minimo l'uso di elettronica sofisticata, che aiuterà anche a ridurre i costi complessivi per i pazienti.
Questo progetto è condotto in collaborazione con il Children's Hospital di Orange County, dove i pazienti di una clinica pediatrica per i disturbi del movimento aiuteranno a testare e perfezionare i prototipi.
Inoltre, il team di ricerca terrà riunioni annuali presso l'ospedale per ciascuno dei quattro anni del progetto. Questi incontri includeranno i pazienti e le loro famiglie, così come i terapisti occupazionali, e susciteranno il loro feedback sulla tecnologia man mano che si sviluppa.

Partendo da sinistra l'attuatore è in uno stato non pressurizzato e si muove verso il gonfiaggio a pressioni crescenti. Credito:Jonathan Realmuto/UCR
"Centrando le parti interessate nel nostro processo di progettazione, speriamo di sviluppare un prodotto che funzioni veramente per loro", ha affermato Realmuto.
Il team di sviluppo vede questo lavoro come un miglioramento dell'indipendenza non solo per i pazienti pediatrici stessi, ma anche per intere comunità.
"Se possiamo aiutare i bambini a lavarsi i denti, versare acqua o aprire porte, azioni che altri danno per scontate, è una grande vittoria per loro", ha detto Realmuto. "Ma è anche una vittoria per le loro famiglie e tutori."
Sebbene questo progetto sia incentrato sui bambini con disturbi del movimento, la tecnologia può essere eventualmente utilizzata per altre applicazioni e popolazioni, inclusi pazienti geriatrici e altri adulti con problemi di movimento.
"La nostra tecnologia è universale", ha affermato Realmuto. + Esplora ulteriormente














