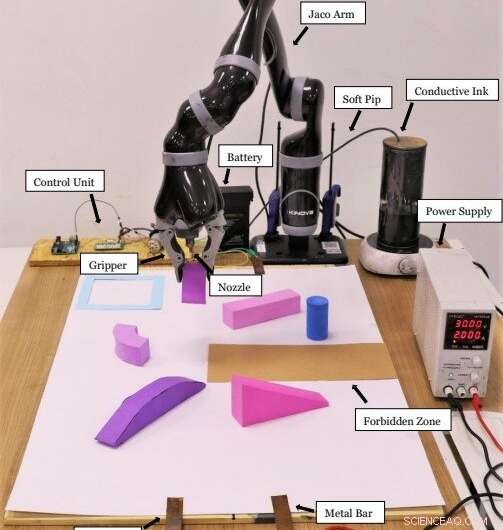
Configurazione sperimentale del robot di disegno del circuito. Il Kinova 6DOF Jaco Arm esegue prima le azioni pick-and-place nella posa suggerita dalla rete. Quindi il braccio si sposta su una delle barre di metallo a 5 cm sopra il cartone. Il controller ROS invia continuamente i waypoint del percorso del circuito calcolato dall'algoritmo di pianificazione del percorso 3D. Un Arduino riceve quindi lo stato del braccio tramite ROS e imposta l'accensione/spegnimento della pompa peristaltica per controllare il flusso di inchiostro. La connessione inizia a mostrare conduttività dopo che l'inchiostro si è asciugato (30 minuti). Crediti:Xianglong Tan, Zhikang Liu, Chen Yu, Andre Rosendo, Riorganizzare l'ambiente per massimizzare l'energia con un disegno di un circuito robotico. arXiv:2111.08147v1 [cs.RO], https://arxiv.org/abs/2111.08147
I recenti progressi tecnologici hanno spianato la strada alla creazione di sistemi robotici sempre più sofisticati progettati per completare autonomamente missioni in diversi ambienti familiari e non. I robot destinati a funzionare in ambienti incerti o remoti potrebbero trarre grandi vantaggi dalla capacità di acquisire attivamente energia elettrica dall'ambiente circostante.
I ricercatori del Worcester Polytechnic Institute, dell'Imperial College London e dell'Università dell'Illinois Urbana Champaign hanno recentemente sviluppato un nuovo sistema robotico in grado di riorganizzare visivamente l'ambiente circostante per ricevere la massima quantità di energia da una determinata fonte di alimentazione. Questo robot, presentato in un documento pre-pubblicato su arXiv e che sarà presentato alla IEEE International Conference on Robotics and Biomimetics, funziona disegnando circuiti elettrici utilizzando inchiostro conduttivo.
"Il nostro PLOS ONE il lavoro è iniziato come un esperimento mentale piuttosto filosofico", ha detto a TechXplore Andre Rosendo, il professore che ha condotto lo studio. "Nietzsche afferma che l'istinto primordiale dell'uomo è il potere e la sopravvivenza è solo una condizione sine qua non che non potremmo raggiungere obiettivo finale. Sulla base di questa idea, abbiamo iniziato a ideare impostazioni sperimentali in cui il nostro robot potesse non solo agire per sopravvivere, ma anche per prosperare."
Nel loro primo studio incentrato su questo argomento, Andre Rosendo, Xianglong Tan e Weijie Lyu hanno cercato di ideare un sistema che potesse alimentarsi semplicemente dipingendo circuiti elettrici. Nel loro nuovo lavoro, hanno combinato questo sistema di stampa di circuiti con una pinza robotica, creando un robot in grado di eseguire un repertorio di azioni volte a ottenere una maggiore potenza (cioè tensioni più elevate) dal suo ambiente e sopravvivere così in ambienti sfavorevoli.
Il team ha testato il proprio robot in simulazioni di diversi scenari del mondo reale, comprese attività in cui doveva evitare ostacoli fisici o regioni che avrebbero interrotto i suoi circuiti disegnati. Hanno quindi testato il robot in un ambiente reale, per valutarne ulteriormente le capacità.
"Il nostro robot inizia ogni esperimento con una batteria e la sua fonte di energia diminuisce mentre si muove (e lo 'perdiamo' anche per emulare le perdite di energia naturali dovute all'omeostasi)", ha spiegato lo studente Xianglong Tan. "Il robot attraversa una serie di episodi di addestramento virtuale, con un terminale Rosso (VCC) che deve essere collegato a un altro terminale rosso vicino al suo corpo, e un terminale Nero (Terra) che deve corrispondere a quello nero in modo che la corrente può fluire verso la sua batteria."
Per evitare che il loro robot si muova semplicemente in linea retta, Rosendo e i suoi colleghi hanno aggiunto ostacoli nell'ambiente circostante, sia in prove simulate che nel mondo reale. Alcuni di questi ostacoli, come i cubetti di schiuma, potevano essere facilmente rimossi dai robot, mentre altri erano collegati a una piastra di messa a terra che "risucchiava" l'energia elettrica quando un circuito lo toccava.
Il team ha scoperto che il loro robot ha imparato rapidamente ed efficacemente a superare questi ostacoli per sopravvivere e massimizzare l'energia ricevuta. Ciò significava riorganizzare gli ostacoli o superare le aree circostanti che non poteva attirare.
"Penso che stiamo compiendo passi verso comportamenti adattivi per i robot", ha affermato Rosendo. "Gli esseri umani sono in grado di adattarsi, adeguare il loro comportamento a quello richiesto in nuove situazioni e migliorare gradualmente man mano che le loro conoscenze maturano. Potremmo parlare di sport, compiti o persino missioni spaziali:prima di essere al top del nostro gioco spendiamo il nostro gli sforzi iniziali per comprendere le nuove regole per, in seguito, migliorare e andare oltre. I robot oggigiorno lottano per superare i malfunzionamenti e imparare ad adattarsi per mantenersi funzionali è un'abilità che dovrebbero imitare da noi."
Il robot adattatore creato da Rosendo e dai suoi colleghi potrebbe avere numerosi vantaggi, in quanto può massimizzare autonomamente l'energia nell'ambiente circostante e mantenersi continuamente funzionante creando nuovi circuiti elettrici. In futuro, questo recente lavoro potrebbe ispirare lo sviluppo di altri sistemi robotici in grado di sopravvivere e prosperare in ambienti complessi senza la necessità di nuovi circuiti o supervisione umana.
"Ora stiamo pensando ai prossimi passi per costruire sul nostro lavoro e mantenere questo esperimento interessante, come complicare il compito e ideare un sistema di 'scambio batteria' per rendere l'esperimento più realistico", ha aggiunto Tan. + Esplora ulteriormente
© 2022 Rete Science X