Credito:Rui Wang, Istituto di automazione, Accademia cinese delle scienze
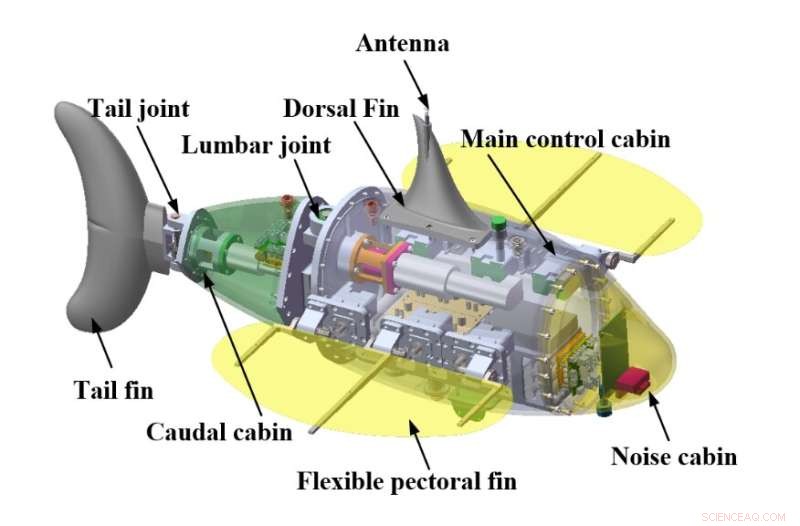
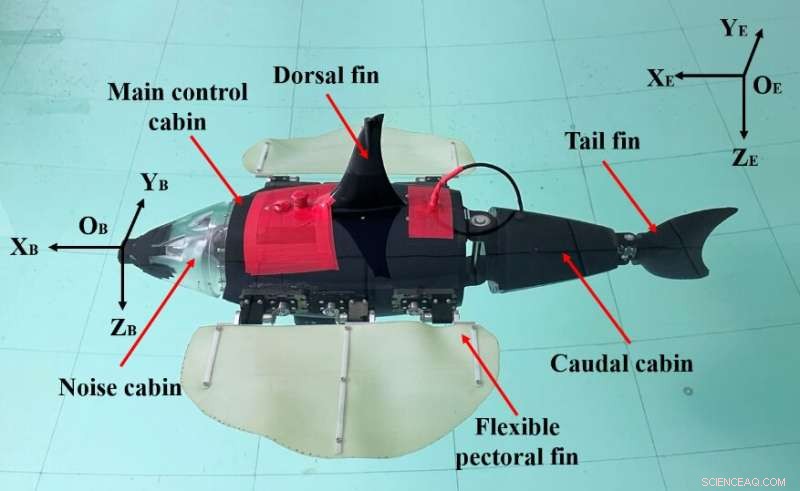
I robot subacquei vengono ampiamente utilizzati come strumenti in una varietà di attività marine. Il RobDact è uno di questi veicoli subacquei bionici, ispirato a un pesce chiamato Dactylopteridae noto per le sue pinne pettorali allargate. Un team di ricerca ha combinato la fluidodinamica computazionale e un esperimento di misurazione della forza per studiare il RobDact, creando un modello idrodinamico accurato del RobDact che consente loro di controllare meglio il veicolo.
Il team ha pubblicato i risultati in Cyborg and Bionic Systems il 31 maggio 2022.
I robot subacquei sono ora utilizzati per molte attività marine, tra cui l'industria della pesca, l'esplorazione subacquea e la mappatura. La maggior parte dei tradizionali robot subacquei è azionata da un'elica, che è efficace per la navigazione in acque aperte a velocità stabile. Tuttavia, i robot subacquei spesso devono essere in grado di muoversi o librarsi a basse velocità in acque turbolente, mentre svolgono un compito specifico. È difficile per l'elica spostare il robot in queste condizioni. Un altro fattore quando un robot subacqueo si muove a bassa velocità in acque che scorrono instabili è il movimento di "contrazioni" dell'elica. Queste contrazioni generano impulsi fluidi imprevedibili che riducono l'efficienza del robot.
Negli ultimi anni, i ricercatori hanno lavorato per creare robot sottomarini che imitano le creature viventi. Questi veicoli bionici si muovono nell'acqua in modo simile al modo in cui si muovono i pesci o le mante. Rispetto ai tradizionali veicoli a propulsione subacquea, questi veicoli subacquei bionici operano in acqua in modo più efficiente e robusto, pur rispettando l'ambiente.
Credito:Rui Wang, Istituto di automazione, Accademia cinese delle scienze
I robot subacquei sono influenzati dal fluido circostante mentre si muovono nell'acqua. Questo fenomeno è chiamato effetto idrodinamico. Mentre si muove nell'acqua, il robot deve gestire un flusso e una forza d'acqua sconosciuti, che possono causare modifiche non necessarie nella posizione del robot.
Per controllare meglio il robot, i ricercatori hanno bisogno di un modello idrodinamico più accurato. La creazione di questo modello è solitamente molto complessa e difficile. Inoltre, il reale ambiente sottomarino è mutevole e difficile da prevedere, quindi i parametri del modello possono cambiare con un cambiamento nell'ambiente. I ricercatori hanno utilizzato la fluidodinamica computazionale per creare modelli idrodinamici per robot subacquei.
Tuttavia, i modelli creati con la sola fluidodinamica computazionale non sono così precisi e pratici come dovrebbero. Per superare questa sfida, il team di ricerca ha provato un approccio diverso. "Per rendere il modello idrodinamico più accurato e pratico, abbiamo combinato la fluidodinamica computazionale e un esperimento di misurazione della forza", ha affermato Rui Wang, ricercatore presso l'Istituto di automazione dell'Accademia cinese delle scienze.
Credito:Rui Wang, Istituto di automazione, Accademia cinese delle scienze
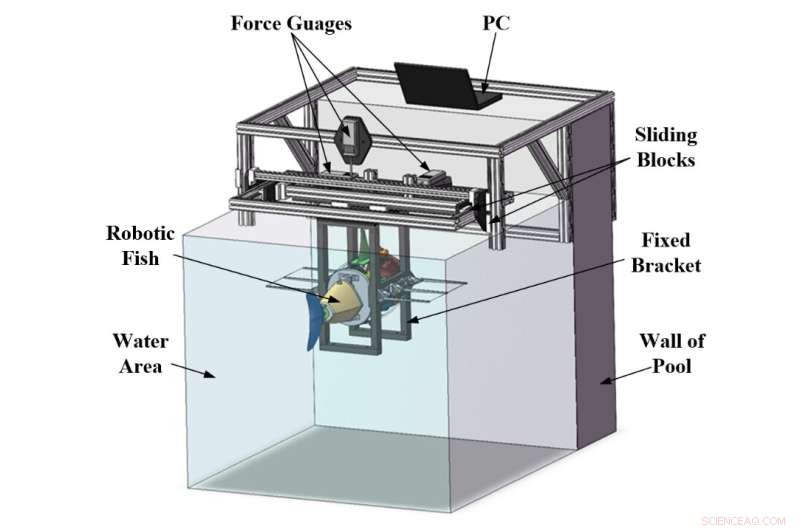
Utilizzando la fluidodinamica computazionale, i ricercatori hanno identificato i parametri nel modello idrodinamico. Quindi hanno sviluppato una piattaforma di misurazione della forza per ottenere la forza generata dal veicolo RobDact. Con questo processo, potrebbero ottenere sia la forza di disturbo che la forza generata dal RobDact in qualsiasi ambiente complesso. "Questo potrebbe aiutarci a comprendere meglio lo stato di movimento del veicolo sottomarino e controllare il veicolo sottomarino in modo più accurato", ha affermato Qiyuan Cao, ricercatore presso l'Istituto di automazione dell'Accademia cinese delle scienze.
Con il loro esperimento, il team è stato in grado di determinare la forza idrodinamica del RobDact a velocità diverse. La piattaforma di misurazione della forza che hanno sviluppato ha permesso loro di misurare la forza di RobDact nelle direzioni X, Y e Z. Hanno stabilito una relazione di mappatura tra i parametri di fluttuazione di RobDact e la spinta del veicolo attraverso i loro esperimenti di misurazione della forza. Unendo il modello dinamico del corpo rigido di RobDact con il modello di mappatura della spinta, i ricercatori sono stati in grado di sviluppare un modello idrodinamico accurato e pratico del RobDact con movimenti variabili.
Guardando al futuro, i ricercatori intendono studiare il controllo intelligente dei veicoli subacquei bionici utilizzando il modello idrodinamico in combinazione con metodi di intelligenza artificiale, come l'apprendimento per rinforzo. "L'obiettivo finale è promuovere l'applicazione pratica dei veicoli subacquei bionici nel monitoraggio dell'ambiente acquatico e nella ricerca e salvataggio sottomarini", ha affermato Wang. + Esplora ulteriormente