un aliante, con la banchisa di Getz sullo sfondo, in preparazione per la distribuzione nel gennaio 2018 sotto la vicina piattaforma di ghiaccio Dotson. Credito:Jason Gobat/Università di Washington
Un team di robot oceanici schierati nel gennaio 2018 ha, durante l'ultimo anno, sono stati i primi robot oceanici autoguidati a viaggiare con successo sotto una calotta di ghiaccio e tornare a riportare osservazioni a lungo termine.
Al di là della semplice sopravvivenza, la missione robotica, una partnership tra il College of the Environment dell'Università di Washington, il Laboratorio di Fisica Applicata UW, il Lamont-Doherty Earth Observatory della Columbia University, il Korean Polar Research Institute e la Paul G. Allen Family Foundation, si è avventurato 18 volte sotto la piattaforma di ghiaccio, raggiungendo ripetutamente più di 40 chilometri (25 miglia) nella cavità, tra i viaggi più lontani finora in questo ambiente infido.
"Questa è la prima volta che uno dei moderni, piattaforme di lunga durata hanno effettuato misurazioni prolungate sotto una piattaforma di ghiaccio, " ha detto Craig Lee, un professore UW di oceanografia e membro del Laboratorio di Fisica Applicata. "Abbiamo effettuato ampie misurazioni all'interno della cavità. Gli alianti sono stati in grado di navigare a piacimento per esaminare l'interno della cavità, mentre i galleggianti cavalcavano le correnti oceaniche per accedere all'interno della cavità.
"È un grande passo avanti, " ha aggiunto Lee. "Questa è la prima volta che siamo stati in grado di mantenere una presenza persistente nell'arco di un intero anno".
Il progetto finanziato dalla Paul G. Allen Family Foundation cerca di dimostrare la tecnologia e raccogliere più dati dalla parte inferiore delle piattaforme di ghiaccio che sostengono le calotte glaciali molto più grandi. Osservazioni dirette di come l'acqua di mare più calda interagisce con la parte inferiore delle piattaforme di ghiaccio migliorerebbero i modelli delle dinamiche delle calotte glaciali in Antartide e Groenlandia, che tengono le più grandi incognite per l'innalzamento del livello del mare globale.
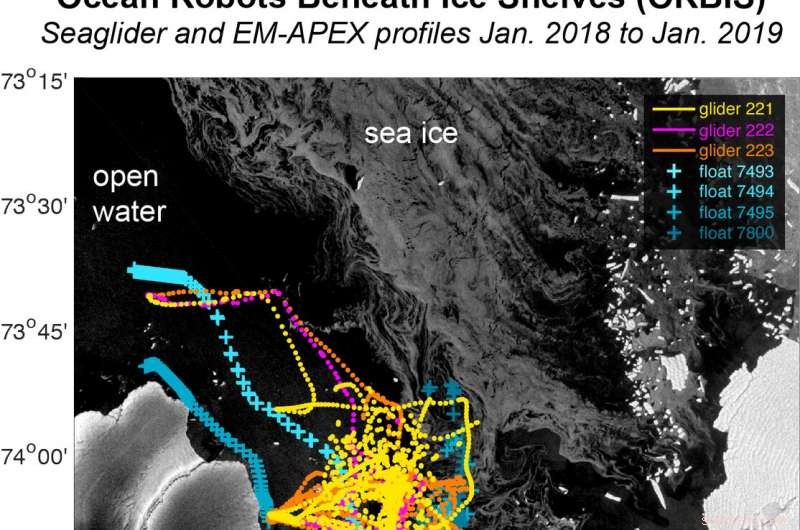
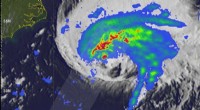
I percorsi di viaggio degli strumenti nell'ultimo anno. Rosa, le tracce arancioni e gialle mostrano i tre Seagliders che navigano da soli. Le tracce verde acqua mostrano i galleggianti alla deriva. Lo sfondo è un'immagine satellitare di Dotson Ice Shelf catturata il 28 febbraio. Credito:Luc Rainville/Università di Washington
"Alcune calotte di ghiaccio terminano in grandi banchi di ghiaccio che galleggiano sull'oceano, e quelli fanno da contrafforte, " disse Lee. "Se le piattaforme di ghiaccio crollano o si indeboliscono, a causa dello scioglimento degli oceani, Per esempio, le calotte glaciali dietro di loro possono accelerare verso il mare, aumentare il tasso di innalzamento del livello del mare".
"La maggior parte dell'incertezza nelle previsioni di aumento del livello del mare globale da decenni a secoli proviene dalle calotte glaciali, che potrebbe contribuire da 1 piede fino a 6 piedi entro il 2100, " disse Pierre Dutrieux, professore di oceanografia presso il Lamont-Doherty Earth Observatory. "Un fattore chiave è l'interazione con il calore dell'oceano e questi nuovi strumenti aprono prospettive allettanti per migliorare la comprensione attuale".
La missione è partita alla fine del 2017 per testare un nuovo approccio per la raccolta di dati sotto una piattaforma di ghiaccio, e il 24 gennaio 2018, dispositivi sono stati sganciati dal rompighiaccio coreano R/V Araon. Questa settimana, due Seagliders autonaviganti hanno raggiunto il traguardo di un anno di funzionamento continuo intorno e sotto la piattaforma di ghiaccio.
Sottomarini robot azionati dal British Antarctic Survey, noto come Autosub3 e Boaty McBoatface, ha completato con successo viaggi da 24 a 48 ore nel 2009, 2014 e 2018. Queste missioni hanno rilevato distanze simili nella cavità ma sono state campionate in periodi più brevi a causa della necessità di un supporto navale.
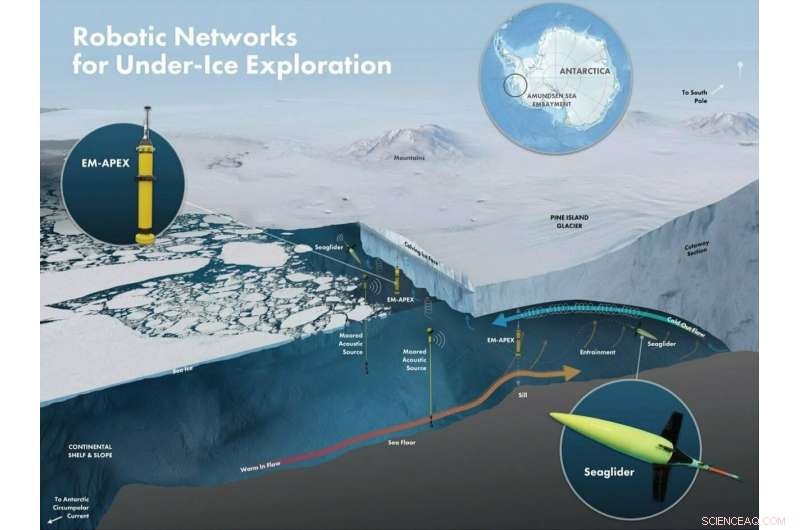
Questo schizzo mostra come tre Seaglider a guida autonoma e quattro galleggianti alla deriva hanno tracciato le condizioni sotto una piattaforma di ghiaccio antartico. Dentro queste grotte, l'acqua salata più calda scorre sul fondo, portando calore che può corrodere il ghiaccio, e l'acqua di disgelo glaciale più fresca scorre sopra. Credito:Università di Washington
Al contrario, la tecnologia del team con sede negli Stati Uniti è più piccola, dispositivi più leggeri che possono funzionare da soli per più di un anno senza alcun supporto navale. La tecnica sperimentale del gruppo ha prima ormeggiato tre fari acustici al fondo del mare per consentire la navigazione sotto la piattaforma di ghiaccio. Ha poi inviato tre Seagliders, robot natatori sviluppati e costruiti presso l'UW, utilizzare sistemi di navigazione preprogrammati per viaggiare sotto la piattaforma di ghiaccio per raccogliere dati.
La missione ha anche schierato quattro strumenti galleggianti EM-APEX sviluppati da UW che si spostano con le correnti a profondità preselezionate sopra il fondo, o sotto la sommità della cavità, mentre periodicamente si muove su e giù per raccogliere più dati. Tutti e quattro questi strumenti alla deriva hanno viaggiato con successo in profondità sotto la piattaforma di ghiaccio con il più pesante, acqua più salata vicino al fondo del mare. Tre sono stati risciacquati con acqua di disgelo fresca vicino alla parte superiore della cavità di ghiaccio circa sei-otto settimane dopo. Un galleggiante rimase sotto molto più a lungo, solo per riapparire il 5 gennaio.
Durante lo scorso anno, la flotta di robot ha raggiunto diversi traguardi:
I ricercatori stanno ora analizzando i dati per la futura pubblicazione, per comprendere meglio come l'acqua di mare interagisce con le piattaforme di ghiaccio e migliorare i modelli di comportamento della calotta glaciale.

Un robot alla deriva noto come Esploratore di profili autonomi elettromagnetici, o EM-APEX, viene calato nell'oceano. Questo è uno dei quattro galleggianti che hanno viaggiato con le correnti sotto il Dotson Ice Shelf. Credito:Paul G. Allen Family Foundation