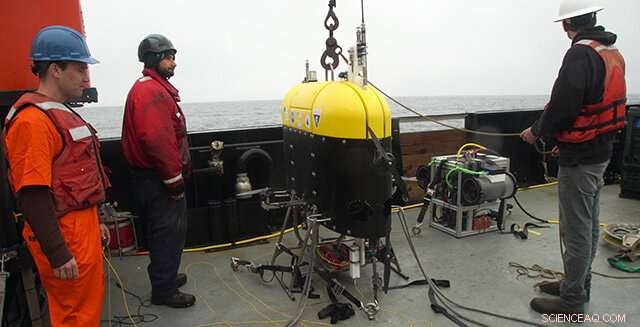
Gli ingegneri della Woods Hole Oceanographic Institution e l'equipaggio della nave sulla R/V Rachel Carson si preparano a lanciare il Mesobot nella baia di Monterey. Sullo sfondo lo “SmartClump” di MBARI, in attesa di schieramento. Credito:Erik Olsen/WHOI
Alla fine di giugno i ricercatori di MBARI si sono uniti agli ingegneri della Woods Hole Oceanographic Institution (WHOI) per testare una nuova generazione di robot sottomarini progettati per aprire nuove strade di ricerca nel mesopelagico, conosciuta anche come la zona crepuscolare dell'oceano. Questo veicolo, il Mesobot, ha avuto origine presso WHOI ed è stato sviluppato negli ultimi due anni con il contributo critico di scienziati e ingegneri di MBARI, Università di Stanford, e l'Università del Texas Rio Grande Valley. Mesobot è specificamente progettato per tracciare e studiare animali che nuotano e alla deriva fino a 1, 000 metri (3, 300 piedi) sotto la superficie per un massimo di 24 ore consecutive.
Il Mesobot estenderà e amplificherà il precedente lavoro a mezz'acqua di MBARI e di altre istituzioni. Per decenni, I ricercatori MBARI guidati da Bruce Robison e Steve Haddock e altri hanno utilizzato veicoli azionati a distanza (ROV) per studiare questi animali a mezz'acqua. Anche se raramente visto, queste creature aiutano a sostenere le principali attività di pesca come il tonno e il pesce spada, fornire cibo ad altri grandi animali come squali e balene, e aiutano a regolare il clima della Terra spostando il carbonio dalla superficie alle acque profonde.
Il progetto è finanziato dalla National Science Foundation, CHI? IO, MBARI, e l'Audacious Project ospitato al TED.
Il team multi-istituzione ha progettato il Mesobot per essere meno distruttivo per gli animali di acque profonde rispetto alla maggior parte dei ROV, dotandolo di fotocamere 4K per condizioni di scarsa illuminazione, luci rosse che sono meno visibili agli animali nel mesopelagico, e grande, eliche a rotazione lenta che riducono al minimo i disturbi in acqua. Un software per computer all'avanguardia consente inoltre al veicolo di tracciare animali o oggetti sott'acqua per un massimo di 24 ore alla volta mentre si muovono attraverso la loro migrazione verticale quotidiana.

Questa foto mostra il Mesobot che segue un animale marino simulato (oggetto bianco su una corda) nella vasca di prova di MBARI. Credito:WHOI/ Erik Olsen
Il Mesobot è un ibrido tra un ROV, che è alimentato e controllato tramite un cavo attaccato a una nave di superficie, e un veicolo subacqueo autonomo (AUV), che è programmato in superficie e funziona senza l'intervento umano mentre è sott'acqua.
All'inizio di ogni immersione, gli operatori controllano Mesobot dalla superficie come un ROV, utilizzando un sottile cavo in fibra ottica. I ricercatori quindi rilasciano il cavo e lo riavvolgono sulla nave, mentre il robot continua da solo come AUV.
Lo staff MBARI è stato coinvolto in diversi aspetti del progetto. Ingegnere capo Kakani Katija, Scienziato senior Bruce Robinson, e l'ingegnere meccanico Brett Hobson sono stati coinvolti nella progettazione concettuale del veicolo. Il sistema informatico principale del veicolo si basa su un progetto sviluppato per l'AUV a lungo raggio di MBARI. Il sistema di tracciamento degli animali è stato progettato dall'ingegnere software Mike Risi, insieme a Katija e MBARI Adjunct e al Professor Steve Rock della Stanford University, basato su un sistema già testato su diversi ROV MBARI.
Durante il recente programma sul campo, gli ingegneri del team hanno assemblato il Mesobot e lo hanno testato nell'enorme vasca interna di prova di acqua salata di MBARI. Dopo aver verificato che il veicolo funzionava correttamente, l'hanno portato in mare sulla nave da ricerca di MBARI Rachel Carson per tre giorni di test sul campo in acque libere a Monterey Bay.

Lancio del Mesobot dal ponte della nave da ricerca MBARI Rachel Carson. Credito:WHOI/ Erik Olsen
Durante le prove sul campo, il Mesobot fece cinque immersioni, ciascuno diverse centinaia di metri sotto la superficie. Questi test hanno aiutato i progettisti a testare i sistemi dei veicoli in condizioni reali e a perfezionare i loro metodi per lanciare il veicolo dal lato di una nave in movimento. La gestione del cavo sottile presentava un particolare, ma previsto, sfida. "La suite di strumentazione scientifica a bordo della Rachel Carson e l'esperta gestione della nave e il lavoro di coperta sono stati cruciali per il nostro successo, ", ha affermato Dana Yoerger, designer e ingegnere capo di Mesobot.
Per aiutare a tenere d'occhio il veicolo e il suo tether, il team ha utilizzato "SmartClump," di MBARI " un fascio ponderato di sensori e telecamere collegati a un cavo. Ciò offre a piloti e scienziati una prospettiva dall'alto che rende le operazioni subacquee più sicure ed efficienti.
Alla fine i ricercatori sperano di utilizzare il Mesobot per eseguire studi giornalieri su singoli animali o gruppi di animali mentre prendono parte alla "migrazione verticale diurna", la più grande migrazione animale sulla Terra. Molti animali marini (compresi delicati, gelatine dal corpo molle) migrano per centinaia di metri verso la superficie dell'oceano al crepuscolo per poi ridiscendere negli abissi all'alba. Questo fenomeno è ancora poco compreso. I ricercatori sperano che il Mesobot sarà in grado di seguire i singoli animali durante la loro migrazione per saperne di più su come e perché affrontano questo faticoso viaggio quotidiano.