Il rover LEAP è basato sul robot con le gambe, ANYmal, sviluppato all'ETH di Zurigo e sul suo spin-off ANYbotics. Credito:ETH Zurigo/RSL Robotics Labs
Un robot a quattro zampe addestrato tramite l'intelligenza artificiale ha imparato la stessa lezione degli astronauti dell'Apollo:saltare può essere il modo migliore per muoversi sulla superficie della luna. Un aggiornamento su LEAP (Legged Exploration of the Aristarchus Plateau), uno studio di concetto di missione supportato dall'ESA per esplorare alcuni dei terreni lunari più difficili, è stato presentato oggi all'Europlanet Science Congress (EPSC) 2022 a Granada da Patrick Bambach.
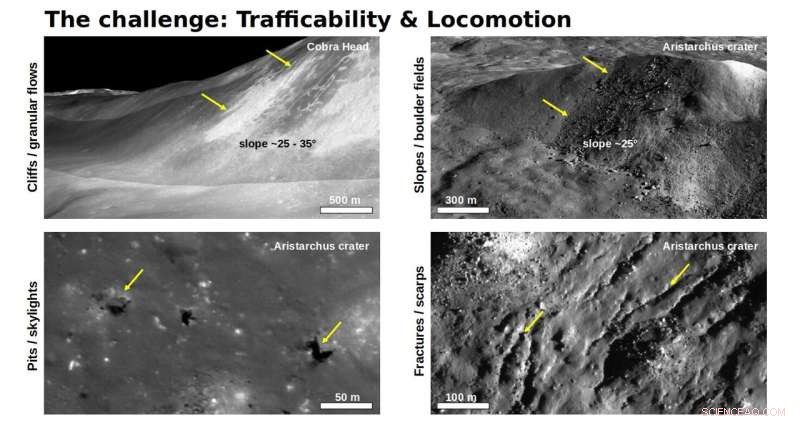
"L'obiettivo di LEAP è l'altopiano di Aristarco, una regione lunare particolarmente ricca di caratteristiche geologiche ma di difficile accesso", ha affermato Patrick Bambach del Max Planck Institute for Solar System Research in Germania. "Con il robot, possiamo studiare le caratteristiche chiave per studiare la storia geologica e l'evoluzione della luna, come l'ejecta attorno ai crateri, i nuovi siti di impatto e i tubi di lava collassati, dove il materiale potrebbe non essere stato alterato dagli agenti atmosferici spaziali e da altri processi. "
Il team LEAP sta lavorando affinché il robot venga integrato sull'European Large Logistic Lander (EL3) dell'ESA, che dovrebbe atterrare sulla luna più volte dalla fine degli anni '20 all'inizio degli anni '30. LEAP è basato sul robot con le gambe, ANYmal, sviluppato all'ETH di Zurigo e sul suo spin-off ANYbotics. Attualmente è adattato all'ambiente lunare da un consorzio dell'ETH di Zurigo, dell'Istituto Max Planck per la ricerca sul sistema solare, dell'OHB, dell'Università di Münster e della Open University.

Diverse versioni del robot con le gambe, ANYmal, sviluppate all'ETH di Zurigo e al suo spin-off ANYbotics. Credito:ETH Zurigo/RSL Robotics Labs
"I rover tradizionali hanno consentito grandi scoperte sulla luna e su Marte, ma hanno dei limiti", ha affermato Bambach. "L'esplorazione di terreni con terreno sciolto, grandi massi o pendenze superiori ai 15 gradi è particolarmente impegnativa con le ruote. Ad esempio, il rover su Marte, Spirit, ha terminato la sua missione quando è rimasto bloccato nella sabbia."
ANYmal può muoversi con diverse andature, consentendogli di coprire grandi distanze in un breve lasso di tempo, arrampicarsi su pendii ripidi, utilizzare strumenti scientifici e persino riprendersi nell'improbabile eventualità di una caduta. Il robot può anche usare le gambe per scavare canali nel terreno, capovolgere massi o rocce più piccole per ulteriori ispezioni e raccogliere campioni.
Inizialmente, il robot è stato addestrato utilizzando un approccio di Reinforcement Learning in un ambiente virtuale per simulare il terreno lunare, la gravità e le proprietà della polvere. È stato anche utilizzato sul campo per un'escursione all'aperto.
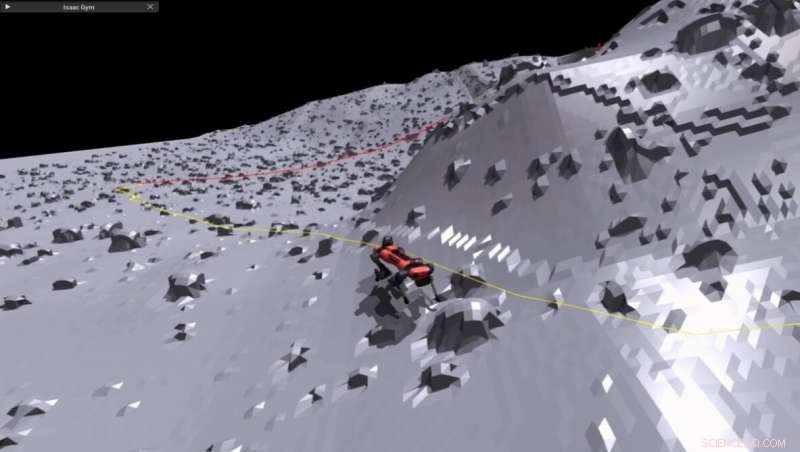
Il rover LEAP viene addestrato utilizzando un approccio di Reinforcement Learning in un ambiente virtuale per simulare il terreno lunare, la gravità e le proprietà della polvere. Credito:ETH Zurigo/RSL Robotics Labs

LEAP (Legged Exploration of the Aristarchus Plateau) è uno studio di concetto di missione finanziato dall'ESA per esplorare alcuni dei terreni lunari più difficili. Credito:ETH Zurigo/RSL Robotics Labs
L'obiettivo di LEAP è l'altopiano di Aristarco, una regione della Luna particolarmente ricca di caratteristiche geologiche ma di difficile accesso. Credito:NASA/ESA
"È interessante notare che ANYmal ha iniziato a utilizzare una modalità di locomozione simile a un salto, proprio come facevano gli astronauti dell'Apollo, rendendosi conto che saltare può essere più efficiente dal punto di vista energetico rispetto a camminare", ha affermato Bambach.
L'attuale progetto rimane al di sotto di 100 kg e include 10 kg di massa del carico utile scientifico, essendo teoricamente in grado di trasportare sensori multispettrali, radar a penetrazione del suolo, spettrometri di massa, gravimetri e altra strumentazione.
"La capacità di LEAP di raccogliere campioni selezionati e portarli su un veicolo di atterraggio o di ascesa offre ulteriori entusiasmanti opportunità per missioni di campionamento e ritorno in ambienti altamente difficili sulla luna o su Marte", ha affermato Bambach. + Esplora ulteriormente