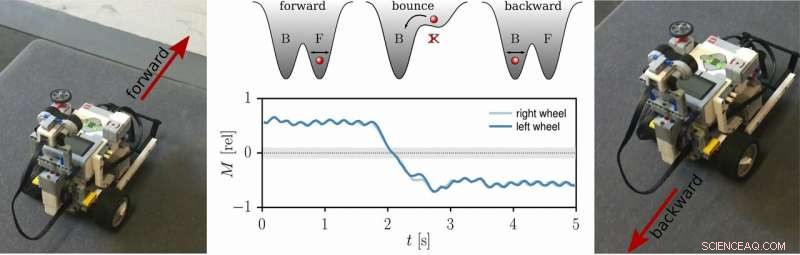
Raffigurante come il robot cambia autonomamente le direzioni di locomozione quando colpisce un muro. Credito:Sandor et al.
Un team di ricercatori della Babes-Bolyai University, in Romania, e la Goethe University di Francoforte hanno recentemente collaborato a uno studio che esplora le implementazioni del controllo del calcio su robot su ruote sia simulati che reali. Il termine "controllo del calcio" si riferisce a brevi, comandi di ordine superiore che possono essere usati per "calciare" un sistema da un attrattore auto-organizzato nel bacino di attrazione di un altro attrattore.
"Quando ci muoviamo, i nostri muscoli reagiscono semplicemente ai segnali che il cervello invia, oppure tengono conto anche dello stato delle articolazioni, dei tendini e dei muscoli stessi?" chiese Claudius Gros, uno dei ricercatori che ha condotto lo studio. "Si parla di 'locomozione incarnata, ' se quest'ultimo è il caso. La nostra ricerca è dedicata a indagare su come l'incarnazione aiuti animali e robot a navigare nel mondo".
In natura, anche gli animali con un sistema nervoso semplice possono navigare in una varietà di ambienti complessi. Per muoversi in ambienti conosciuti e sconosciuti, i robot dovrebbero avere abilità sensomotorie simili. Finora, però, scienziati e ingegneri di tutto il mondo hanno lottato per progettare robot con capacità motorie simili a quelle di umani e animali.
"Coordinare un numero elevato di attuatori in un ambiente in continua evoluzione è sicuramente un compito impegnativo, " Bulcsu Sándor, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "Allora perché non lasciamo che il corpo del robot faccia il duro lavoro, rilevando una parte sostanziale del calcolo? Seguendo questa idea, suggeriamo uno schema di controllo alternativo in cui i modelli di movimento sono generati in modo auto-organizzato. In questo quadro, la locomozione viene creata tramite un'interazione dinamica tra il cervello e il corpo del robot, e l'ambiente».
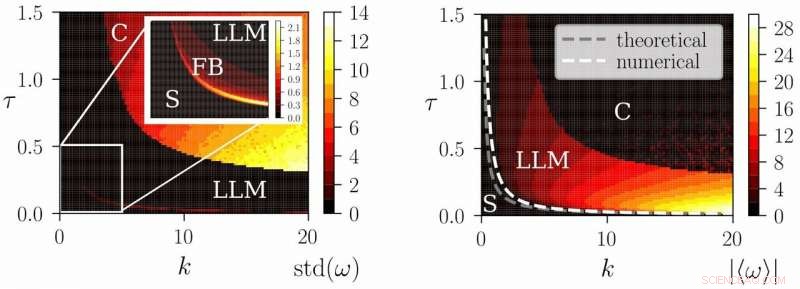
Diagramma di fase del sistema:comportamenti dinamici in funzione dei parametri del controllore.
Sandor, Gros e i loro colleghi hanno ideato una struttura di controllo in cui i movimenti non sono rigidamente definiti, ma piuttosto sono descritti da un insieme di equazioni per il controllo di attuatori che cambiano dinamicamente, incorporare le informazioni proprio-sensoriali del corpo. Hanno quindi testato e perfezionato queste equazioni nell'ambiente di simulazione di LPZRobots.
"A causa dell'interazione del robot con il suo ambiente, è possibile creare diversi modelli di movimento auto-organizzati, " Ha detto Sándor. "Questo ci permette di passare da queste primitive comportamentali a un segnale di controllo ben definito simile a un calcio. Questo è ciò che chiamiamo "controllo del calcio". Finalmente, come prova del concetto, abbiamo implementato questa idea su robot su ruote del mondo reale."
Coordinare la contrazione dei numerosi muscoli del corpo è un compito molto impegnativo, che è innatamente acquisito dalla maggior parte degli esseri umani e degli animali. Nel loro studio, Sandor, Gros e i loro colleghi hanno cercato di escogitare un metodo più semplice per instillare abilità motorie nei robot.
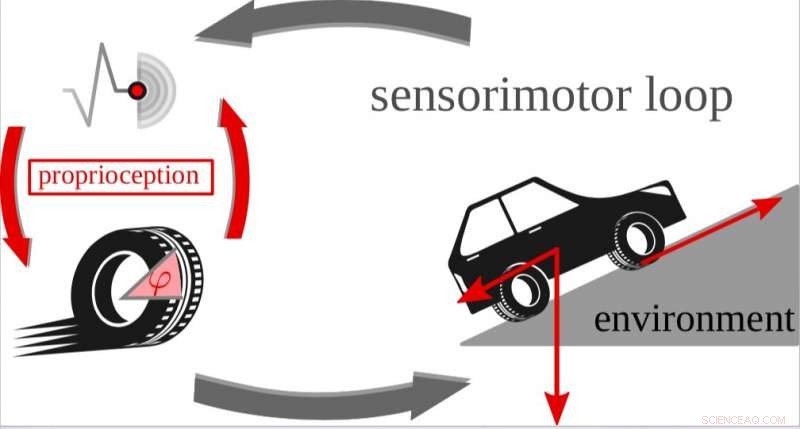
Schizzo di un circuito sensomotorio conforme, in grado di adattarsi all'ambiente. Credito:Sandor et al.
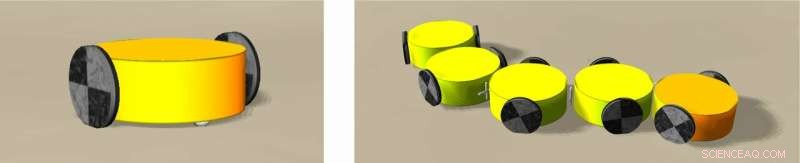
Robot simulati (un'auto, 5 auto collegate in treno). Credito:Sandor et al.
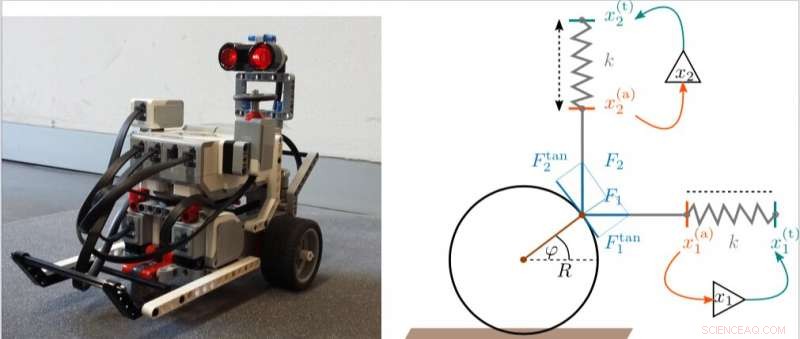
Robot Lego e il meccanismo di controllo che abbiamo usato. Credito:Sandor et al.
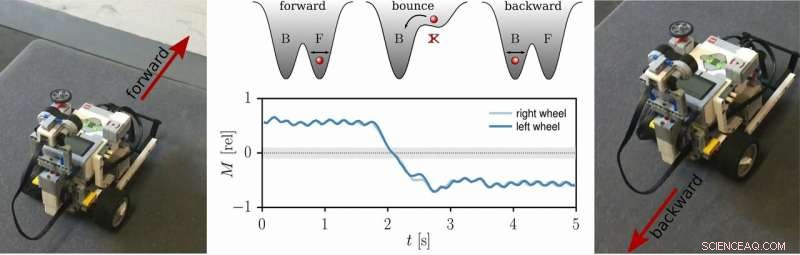
Raffigurante come il robot cambia autonomamente le direzioni di locomozione quando colpisce un muro. Credito:Sandor et al.
"Non sarebbe molto più semplice se il cervello desse solo un breve segnale di calcio e il corpo di un animale o di un robot eseguisse da solo un movimento ben coordinato?" ha detto Gros. "Questa è l'idea chiave alla base del controllo del calcio. Può essere realizzata, come abbiamo scoperto, quando il robot dispone di attuatori auto-organizzati."
I ricercatori hanno valutato la loro struttura su robot su ruote sia simulati che reali, generando la dinamica di ruote distinte in modo indipendente tramite circuiti di feedback locali. Questi circuiti di feedback sono mediati da neuroni che codificano la frequenza, che elaborano input propriosensoriali che descrivono l'effettivo angolo di rotazione di ciascuna ruota. Successivamente, un'asta di trasmissione simulata che assomiglia a quelle utilizzate nelle locomotive a vapore traduce i cambiamenti nell'attività neurale in un movimento rotatorio.
"Dimostriamo come i modelli di movimento auto-organizzati possono essere utilizzati per generare la locomozione incarnata, " Sándor ha detto. "L'utilizzo di questo schema di controllo può aiutare a semplificare i calcoli complessi che devono essere eseguiti per completare vari compiti di locomozione. Combinarlo con altri metodi può portare a potenti strumenti per generare comportamenti robotici complessi. La nostra struttura potrebbe anche contribuire alla comprensione della locomozione animale e umana".
Lo studio condotto da Sándor, Gros e i loro colleghi potrebbero portare a una nuova tecnica per controllare in modo efficiente i movimenti dei robot. Il principale vantaggio pratico della loro struttura è che assegna parte del carico computazionale al corpo del robot. Il loro modello potrebbe essere utilizzato anche per insegnare sistemi dinamici nei corsi di fisica delle scuole superiori, in quanto consente dimostrazioni interattive e coinvolgenti.
I ricercatori stanno ora pianificando di testare i loro algoritmi su architetture di robotica più complesse, incorporando diverse modalità sensoriali nelle loro equazioni. Ad esempio, potrebbero applicare il kick control a un'organizzazione gerarchica di controllori, in cui le informazioni visive attivano una particolare modalità di locomozione.
"Attualmente stiamo lavorando per generalizzare i nostri principi ai robot con le gambe, in particolare esapodi, e i nostri primi risultati sono promettenti, " ha detto Gros. "Stiamo anche studiando l'attivazione del controllo del calcio da parte delle informazioni sensoriali".
© 2019 Science X Network