Unità di origami a torsione quadrata. Credito:Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
La maggior parte dei robot morbidi oggi si affida a potenza e controllo esterni, tenendoli legati a sistemi fuori bordo o armati con componenti rigidi. Ora, ricercatori della Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) e Caltech hanno sviluppato sistemi robotici morbidi, ispirato agli origami, che può muoversi e cambiare forma in risposta a stimoli esterni, aprendo la strada a robot morbidi completamente svincolati.
La ricerca è pubblicata su Robotica scientifica .
"La capacità di integrare materiali attivi all'interno di oggetti stampati in 3D consente la progettazione e la fabbricazione di classi completamente nuove di materia robotica morbida, " ha detto Jennifer A. Lewis, l'Hansjorg Wyss Professor of Biologically Inspired Engineering presso SEAS e co-autore principale dello studio.
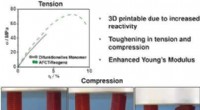
I ricercatori si sono rivolti agli origami per creare robot morbidi multifunzionali. Attraverso pieghe sequenziali, gli origami possono codificare più forme e funzionalità in un'unica struttura. Utilizzando materiali noti come elastomeri a cristalli liquidi che cambiano forma quando esposti al calore, il team di ricerca ha stampato in 3D due tipi di cerniere morbide che si piegano a temperature diverse e quindi possono essere programmate per piegarsi in un ordine specifico.
"Con il nostro metodo di stampa 3D di cerniere attive, abbiamo piena programmabilità sulla risposta alla temperatura, la quantità di coppia che le cerniere possono esercitare, il loro angolo di curvatura, e l'orientamento della piega. Il nostro metodo di fabbricazione facilita l'integrazione di questi componenti attivi con altri materiali, " disse Arda Kotikian, uno studente laureato presso SEAS e la Graduate School of Arts and Sciences e co-primo autore del documento.
"L'utilizzo delle cerniere semplifica la programmazione delle funzioni robotiche e il controllo del modo in cui un robot cambierà forma. Invece di deformare l'intero corpo di un robot morbido in modi che possono essere difficili da prevedere, devi solo programmare come alcune piccole regioni della tua struttura risponderanno ai cambiamenti di temperatura, "ha detto Connor McMahan, uno studente laureato al Caltech e co-primo autore del documento.
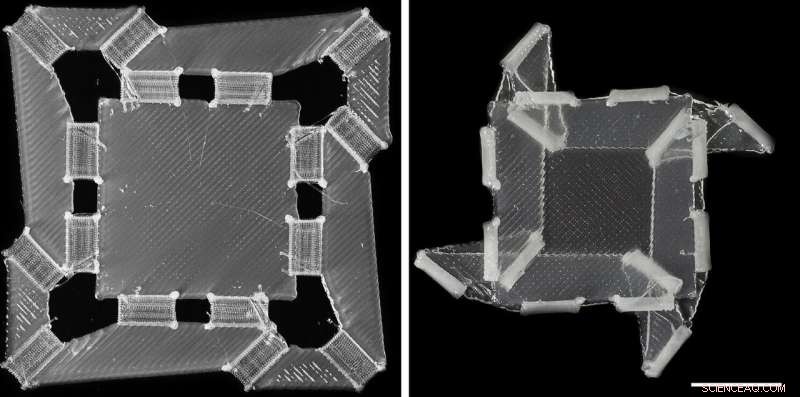
Per dimostrare questo metodo, Kotikian, McMahan, e il team ha costruito diversi dispositivi software, incluso un robot morbido senza legami soprannominato "Rollbot". Il Rollbot inizia come un foglio piatto, circa 8 centimetri di lunghezza e 4 centimetri di larghezza. Quando posto su una superficie calda, circa 200°C, una serie di cerniere si piega e il robot si arriccia in una ruota pentagonale.
Un'altra serie di cerniere è incorporata su ciascuno dei cinque lati della ruota. Una cerniera si piega a contatto con la superficie calda, spingendo la ruota a girare verso il lato successivo, dove si piega la cerniera successiva. Mentre rotolano via dalla superficie calda, le cerniere si aprono e sono pronte per il ciclo successivo.
"Molti robot morbidi esistenti richiedono un collegamento a sistemi di controllo e alimentazione esterni o sono limitati dalla quantità di forza che possono esercitare. Queste cerniere attive sono utili perché consentono ai robot morbidi di operare in ambienti in cui i collegamenti non sono pratici e di sollevare oggetti molte volte più pesante delle cerniere, ", ha detto McMahan.
Un altro dispositivo, se collocato in un ambiente caldo, può piegarsi in una forma piegata compatta simile a una graffetta e aprirsi quando si raffredda.
"Queste strutture svincolate possono essere controllate passivamente, " disse Kotikian. "In altre parole, tutto ciò che dobbiamo fare è esporre le strutture ad ambienti a temperatura specifica e risponderanno in base a come abbiamo programmato le cerniere."
Sebbene questa ricerca si sia concentrata solo sulle risposte della temperatura, gli elastomeri a cristalli liquidi possono anche essere programmati per rispondere alla luce, pH, umidità e altri stimoli esterni.
Rollbot semovente mostrato nella sua configurazione stampata (sopra) e nella sua configurazione piegata (sotto). Credito:Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
"Questo lavoro dimostra come la combinazione di polimeri reattivi in un composito progettato possa portare a materiali con auto-attuazione in risposta a diversi stimoli. In futuro, tali materiali possono essere programmati per svolgere compiti sempre più complessi, confondendo i confini tra materiali e robot, " disse Chiara Daraio, Professore di ingegneria meccanica e fisica applicata al Caltech e co-autore principale dello studio.