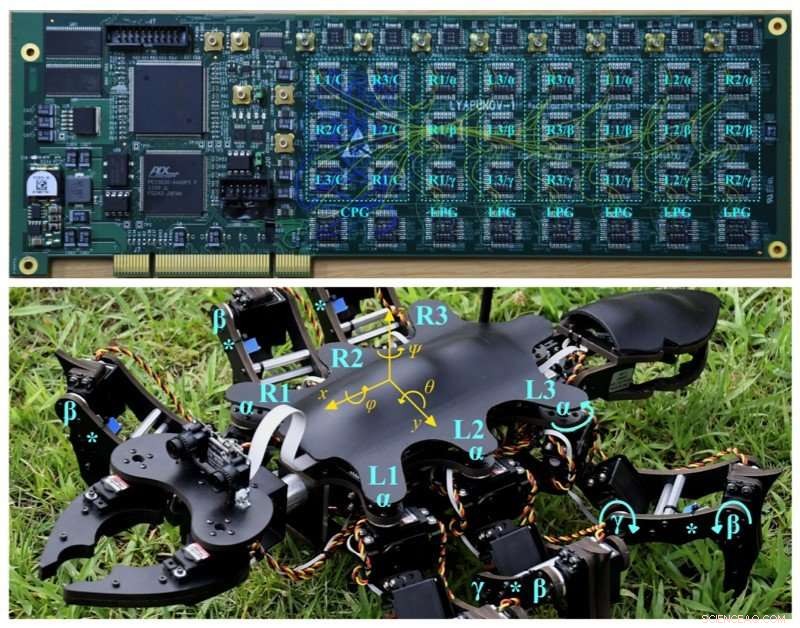
Viste del circuito stampato che implementa il controller e del robot. (Riprodotto con il permesso dell'articolo pubblicato). Credito:ACCESSO IEEE
Uno studio condotto dai ricercatori del Tokyo Institute of Technology (Tokyo Tech) ha scoperto nuovi modi di guidare i robot a più gambe tramite un controller a due livelli. Il controller proposto utilizza una rete di cosiddetti oscillatori non lineari che consente la generazione di diverse andature e posture, che sono specificati solo da pochi parametri di alto livello. Lo studio ispira nuove ricerche su come controllare i robot a più gambe, anche in futuro utilizzando interfacce cervello-computer.
Nel mondo naturale, molte specie possono camminare su pendii e superfici irregolari, raggiungendo luoghi inaccessibili anche ai robot rover più avanzati. Rimane un mistero come i movimenti complessi vengano gestiti in modo così fluido anche dalle creature più piccole.
Quello che sappiamo è che anche i cervelli più semplici contengono circuiti generatori di pattern (CPG), che sono cablati appositamente per generare schemi di camminata. I tentativi di replicare artificialmente tali circuiti hanno finora avuto un successo limitato, a causa della scarsa flessibilità.
Ora, ricercatori in Giappone e in Italia propongono un nuovo approccio alla generazione del modello di camminata, basato su una rete gerarchica di oscillatori elettronici disposti su due livelli, che hanno dimostrato usando un robot esapode simile a una formica. Il risultato apre nuove strade per il controllo dei robot con le gambe. Pubblicato in Accesso IEEE , la ricerca è il risultato della collaborazione tra scienziati di Tokyo Tech, in parte finanziato dalla World Research Hub Initiative, l'Accademia polacca delle scienze di Cracovia, Polonia, e l'Università di Catania, Italia.
Il controller di ispirazione biologica si compone di due livelli. In cima, contiene un CPG, responsabile del controllo della sequenza complessiva dei movimenti delle gambe, noto come andatura. In fondo, contiene sei generatori di pattern locali (GPL), responsabile del controllo delle traiettorie delle singole gambe.
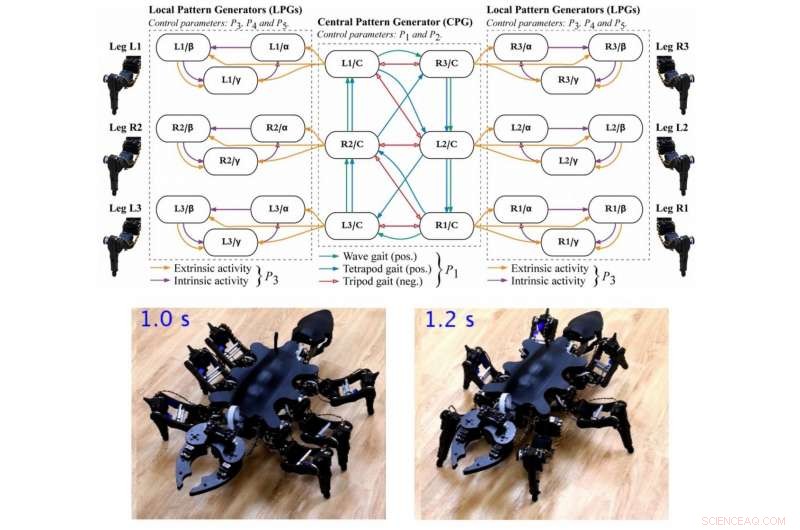
In alto:Architettura del controller, che mostra il generatore di pattern centrale, che controlla lo schema generale del passo, e da entrambi i lati, i sei generatori di pattern locali, che controllano le traiettorie delle singole gambe. In basso:immagini fisse rappresentative del robot che cammina in una postura simile a una formica (a sinistra) e una postura simile a uno scarafaggio (a destra). Credito:ACCESSO IEEE
L'autore principale dello studio, Ludovico Minati, che è anche affiliato all'Accademia polacca delle scienze di Cracovia, Polonia e invitato all'Institute of Innovative Research (IIR) di Tokyo Tech attraverso la World Research Hub Initiative spiega che gli insetti possono adattare rapidamente la loro andatura a seconda di un'ampia gamma di fattori, ma soprattutto la loro velocità di camminata. Alcune andature sono osservate frequentemente e sono considerate canoniche, ma in realtà, è disponibile un numero quasi infinito di andature, e diversi insetti come formiche e scarafaggi realizzano andature simili in posizioni molto diverse.
Sono state incontrate difficoltà nel tentativo di condensare così tanta complessità in generatori di schemi artificiali. Il controller proposto mostra un altissimo livello di versatilità grazie all'implementazione basata su field-programmable analog arrays (FPAA), che consentono la riconfigurazione e la regolazione al volo di tutti i parametri del circuito. Si basa su anni di ricerche precedenti su reti elettroniche non lineari e caotiche, che ha dimostrato la loro capacità di replicare i fenomeni osservati nei cervelli biologici, anche quando cablato in configurazioni molto semplici.
"Forse il momento più emozionante della ricerca è stato quando abbiamo osservato che il robot esibiva fenomeni e andature che non avevamo progettato né previsto, e poi scoperto che esistono anche negli insetti biologici, " dice Minati. Tali fenomeni emergenti sorgono particolarmente in quanto la rete è realizzata con componenti analogiche e consente un certo grado di auto-organizzazione, rappresentando un approccio che differisce notevolmente dall'ingegneria convenzionale, dove tutto è pensato a priori e fisso. "Questo ci avvicina molto al modo in cui funziona la biologia, " Aggiunge.
Yasuharu Koike, anche con sede presso l'IIR, commenta:"Un aspetto importante del controller è che condensa tanta complessità in un numero limitato di parametri. Questi possono essere considerati parametri di alto livello, in quanto impostano esplicitamente l'andatura, velocità, postura, ecc. Poiché possono essere modificati dinamicamente, in futuro dovrebbe essere facile variarli in tempo reale utilizzando un'interfaccia cervello-computer, permettendo il controllo di cinematiche complesse altrimenti impossibili da dominare con gli approcci attuali."
E Natsue Yoshimura, anche con sede presso l'IIR, afferma:"Poiché il controllore risponde gradualmente e incarna un approccio biologicamente plausibile alla generazione del modello, pensiamo che possa essere più fluido da guidare rispetto ai sistemi che decodificano i comandi discreti. Questo può avere implicazioni pratiche, e il nostro laboratorio ha un notevole know-how in questo settore."