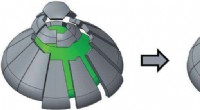
I ricercatori del MIT hanno creato una pelle “sensorizzata”, realizzato con sensori ispirati al kirigami, che dà ai robot morbidi una maggiore consapevolezza del movimento e della posizione dei loro corpi. Credito:Ryan L. Truby, MIT CSAIL
Per la prima volta, I ricercatori del MIT hanno permesso a un braccio robotico morbido di comprendere la sua configurazione nello spazio 3D, sfruttando solo i dati di movimento e posizione dalla propria pelle "sensorizzata".
Robot morbidi costruiti con materiali altamente cedevoli, simili a quelli che si trovano negli organismi viventi, vengono difesi come più sicuri, e più adattabile, resiliente, e alternative bioispirate ai tradizionali robot rigidi. Ma dare un controllo autonomo a questi robot deformabili è un compito monumentale perché possono muoversi in un numero virtualmente infinito di direzioni in un dato momento. Ciò rende difficile addestrare modelli di pianificazione e controllo che guidano l'automazione.
I metodi tradizionali per ottenere il controllo autonomo utilizzano ampi sistemi di più telecamere di acquisizione del movimento che forniscono ai robot feedback sul movimento e sulle posizioni 3D. Ma questi non sono pratici per i robot morbidi nelle applicazioni del mondo reale.
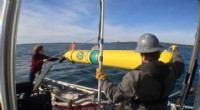
In un articolo in corso di pubblicazione sulla rivista Lettere IEEE sulla robotica e l'automazione , i ricercatori descrivono un sistema di sensori morbidi che coprono il corpo di un robot per fornire "propriocezione", ovvero consapevolezza del movimento e della posizione del suo corpo. Quel feedback si imbatte in un nuovo modello di deep learning che setaccia il rumore e cattura segnali chiari per stimare la configurazione 3D del robot. I ricercatori hanno convalidato il loro sistema su un braccio robotico morbido simile a una proboscide di elefante, che può prevedere la propria posizione mentre oscilla e si estende autonomamente.
I sensori morbidi dei ricercatori sono fogli di silicone conduttivo tagliati in modelli kirigami. Hanno proprietà “piezoresistive”, il che significa che cambiano nella resistenza elettrica quando vengono sollecitati. Poiché il sensore si deforma in risposta all'allungamento e alla compressione del braccio robotico, la sua resistenza elettrica viene convertita in una tensione di uscita che viene quindi utilizzata come segnale correlato a quel movimento. Credito:Ryan L. Truby, MIT CSAIL
I sensori possono essere fabbricati utilizzando materiali standard, il che significa che ogni laboratorio può sviluppare i propri sistemi, dice Ryan Truby, un postdoc nel Computer Science and Artificial Laboratory (CSAIL) del MIT che è co-primo autore dell'articolo insieme al postdoc CSAIL Cosimo Della Santina.
"Stiamo sensorizzando robot morbidi per ottenere feedback per il controllo dai sensori, non sistemi di visione, usando un molto facile, metodo rapido per la fabbricazione, " dice. "Vogliamo usare questi morbidi bauli robotici, ad esempio, orientarsi e controllarsi automaticamente, per raccogliere le cose e interagire con il mondo. Questo è un primo passo verso quel tipo di controllo automatizzato più sofisticato".
Un obiettivo futuro è quello di aiutare a creare arti artificiali in grado di gestire e manipolare più abilmente gli oggetti nell'ambiente. "Pensa al tuo corpo:puoi chiudere gli occhi e ricostruire il mondo in base al feedback della tua pelle, " dice la co-autrice Daniela Rus, direttore del CSAIL e Andrea ed Erna Viterbi Professore di Ingegneria Elettrica e Informatica. "Vogliamo progettare le stesse capacità per i robot morbidi".
Sensori morbidi sagomati

Credito:Massachusetts Institute of Technology
Un obiettivo di lunga data nella robotica morbida sono i sensori del corpo completamente integrati. I sensori rigidi tradizionali sminuiscono la naturale cedevolezza di un corpo robotico morbido, complicare la sua progettazione e fabbricazione, e può causare vari guasti meccanici. I sensori a base di materiale morbido sono un'alternativa più adatta, ma richiedono materiali e metodi specializzati per la loro progettazione, rendendoli difficili da fabbricare e integrare in robot morbidi per molti laboratori di robotica.
Un giorno, mentre lavorava nel suo laboratorio CSAIL alla ricerca di ispirazione per i materiali dei sensori, Truby ha fatto una connessione interessante. "Ho trovato questi fogli di materiali conduttivi usati per schermare le interferenze elettromagnetiche, che puoi acquistare ovunque in rotoli, " dice. Questi materiali hanno proprietà "piezoresistive", il che significa che cambiano nella resistenza elettrica quando vengono sollecitati. Truby si rese conto che avrebbero potuto creare sensori morbidi efficaci se fossero stati posizionati in determinati punti del tronco. Poiché il sensore si deforma in risposta allo stiramento e alla compressione del tronco, la sua resistenza elettrica viene convertita in una specifica tensione di uscita. La tensione viene quindi utilizzata come segnale correlato a quel movimento.
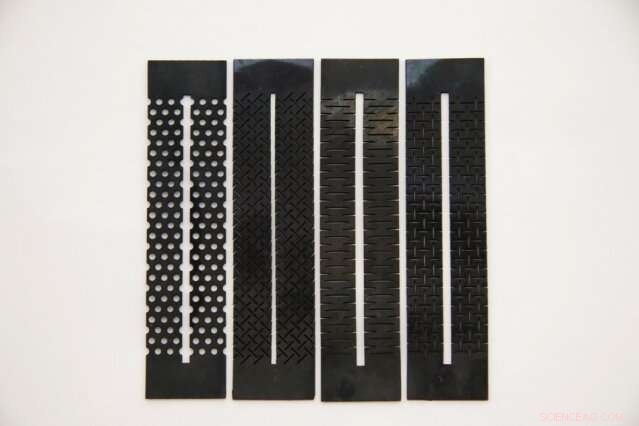
Ma il materiale non si è allungato molto, che ne limiterebbe l'uso per la robotica morbida. Ispirato al kirigami, una variazione dell'origami che include la realizzazione di tagli in un materiale, strisce rettangolari di fogli di silicone conduttivo progettate da Truby e tagliate al laser in vari modelli, come file di piccoli fori o fette che si incrociano come una recinzione a catena. Questo li ha resi molto più flessibili, estensibile, "e bello da vedere, "dice Truby.
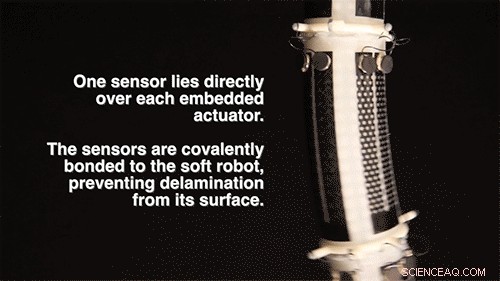
Il tronco robotico dei ricercatori comprende tre segmenti, ciascuno con quattro attuatori fluidici (12 in totale) utilizzati per muovere il braccio. Hanno fuso un sensore su ogni segmento, con ogni sensore che copre e raccoglie dati da un attuatore integrato nel robot morbido. Hanno usato "legame plasma, " una tecnica che energizza una superficie di un materiale per farla legare a un altro materiale. Ci vogliono circa un paio d'ore per modellare dozzine di sensori che possono essere collegati ai robot morbidi utilizzando un dispositivo di incollaggio al plasma portatile.

Credito:Massachusetts Institute of Technology
Come ipotizzato, i sensori hanno catturato il movimento generale del tronco. Ma erano davvero rumorosi. "Essenzialmente, sono sensori non ideali in molti modi, " Dice Truby. "Ma questo è solo un fatto comune nel realizzare sensori con materiali conduttivi morbidi. Sensori più performanti e più affidabili richiedono strumenti specializzati che la maggior parte dei laboratori di robotica non ha".
Per stimare la configurazione del soft robot utilizzando solo i sensori, i ricercatori hanno costruito una rete neurale profonda per fare la maggior parte del lavoro pesante, setacciando il rumore per catturare segnali di feedback significativi. I ricercatori hanno sviluppato un nuovo modello per descrivere cinematicamente la forma del robot morbido che riduce notevolmente il numero di variabili necessarie per l'elaborazione del modello.
Credito:Ryan L. Truby, MIT CSAIL
Negli esperimenti, i ricercatori hanno fatto oscillare il tronco e si è esteso in configurazioni casuali per circa un'ora e mezza. Hanno usato il tradizionale sistema di acquisizione del movimento per i dati sulla verità al suolo. In allenamento, il modello ha analizzato i dati dai suoi sensori per prevedere una configurazione, e ha confrontato le sue previsioni con quei dati di verità fondamentale che venivano raccolti simultaneamente. Così facendo, il modello "impara" a mappare i modelli di segnale dai suoi sensori alle configurazioni del mondo reale. Risultati indicati, che per configurazioni certe e più stabili, la forma stimata del robot corrispondeva alla verità del terreno.
Prossimo, i ricercatori mirano a esplorare nuovi progetti di sensori per una migliore sensibilità e a sviluppare nuovi modelli e metodi di apprendimento profondo per ridurre la formazione richiesta per ogni nuovo robot morbido. Sperano anche di perfezionare il sistema per catturare meglio i movimenti completamente dinamici del robot.
Attualmente, la rete neurale e la pelle del sensore non sono sensibili a catturare movimenti sottili o movimenti dinamici. Ma, per adesso, questo è un primo passo importante per approcci basati sull'apprendimento al controllo robotico morbido, Truby dice:"Come i nostri robot morbidi, i sistemi viventi non devono essere totalmente precisi. Gli umani non sono macchine precise, rispetto alle nostre controparti robotiche rigide, e stiamo bene".
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.